一种环岛锁死预警方法与流程
本发明涉及交通道路的航道控制方法领域,具体涉及一种环岛锁死预警方法。
背景技术:
1、环岛是由一条环形道路和几个进出口组成,用于交通管理和转向。环岛允许车辆绕行而不必停下或改变方向。环岛的设置使得任何一个方向而来的交通流量进入环岛后,均需以环岛的中心圈以单一方向旋转行驶,直至转向所需的行驶方向而离开。因为它不需要信号灯、减少了交通冲突点、提高了交通安全系数、造价比高架桥便宜等原因,通常认为在正常的交通量范围内,环岛的通行效率优于平交路口。
2、但在一些车流量较高的环岛处,车辆需要在环岛外排队较久的时间才有机会进入环岛,并且在交通量一旦超过环岛所能负荷的交通量范围,环岛内就容易出现锁死情况。因此,现有文献的环岛道路交通预警方法、系统、终端设备及计算机可读存储介质,通过在检测到目标车辆进入环岛道路路口后,获取所述目标车辆的行车状态信息;获取垂直于所述环岛道路方向上与所述目标车辆相关的第一交通信息;获取平行于所述环岛道路方向上与所述目标车辆相关的第二交通信息;基于所述目标车辆的行车状态信息、与所述目标车辆相关的第一交通信息和第二交通信息预测所述目标车辆是否能够在所述环岛道路中安全行驶,若否,则向所述目标车辆发出第一预警提示。
3、但是,现有的方法以环岛内车流和行人为目标进行检测,存在检测盲区,不能提前感知交通负荷即将突破环岛承载能力临界值,进而导致环岛锁死预警效果不理想。
技术实现思路
1、本发明意在提供一种环岛锁死预警方法,以解决不能提前感知交通负荷即将突破环岛承载能力临界值的问题。
2、本方案中的环岛锁死预警方法,包括:
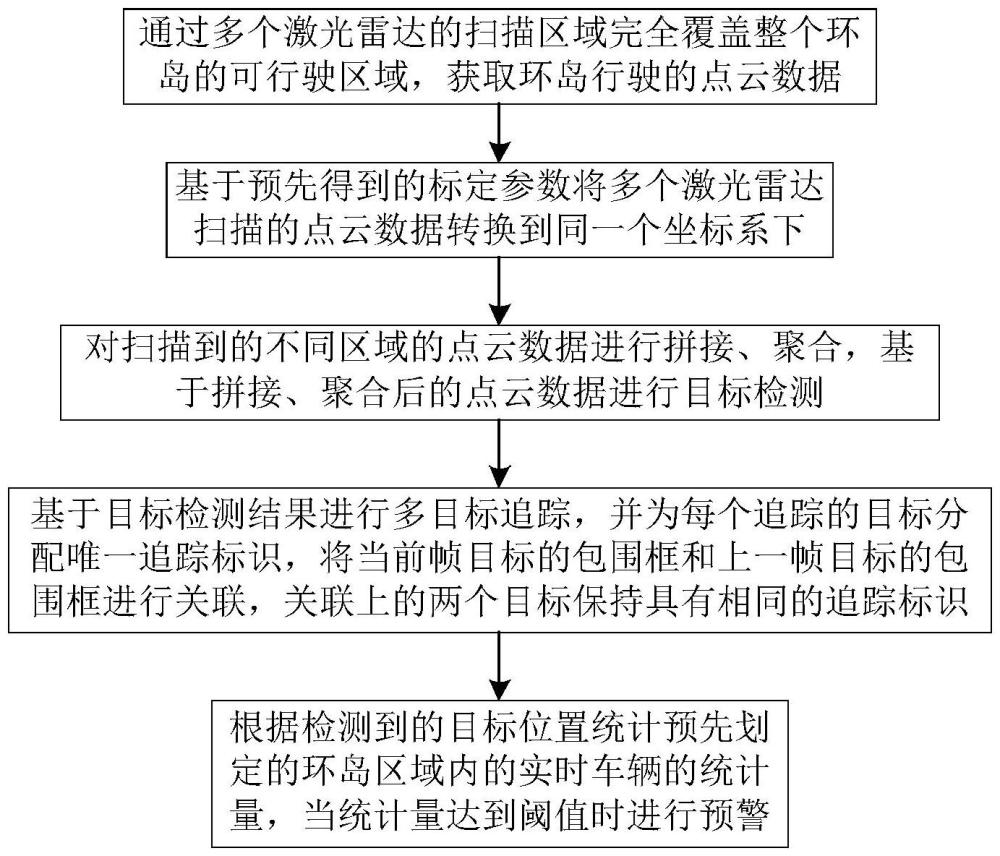
3、s10,通过多个激光雷达的扫描区域完全覆盖整个环岛的可行驶区域,获取环岛行驶的点云数据;
4、s20,基于预先得到的标定参数将多个激光雷达扫描的点云数据转换到同一个坐标系下;
5、s30,对扫描到的不同区域的点云数据进行拼接、聚合,基于拼接、聚合后的点云数据先过滤背景点云,再对前景目标的点云进行聚类,区分每个出每个目标的点云,最后对每个目标的点云拟合出一个包围框作为这个目标的表示,然后输出包围框,只留下前景目标的点云,进行目标检测,目标检测结果以俯视视图的旋转包围框的形式表示环岛内的车辆;
6、s40,基于目标检测结果进行多目标追踪,并为每个追踪的目标分配唯一追踪标识,将当前帧目标的包围框和上一帧目标的包围框进行关联,关联上的两个目标保持具有相同的追踪标识;
7、s50,根据检测到的目标位置统计预先划定的环岛区域内的实时车辆的统计量,当统计量达到阈值时进行预警。
8、本方案的有益效果是:
9、采用多个激光雷达对交通路段的所有交通参与则进行感知,不仅能检测出车流量,还能检测出车辆密度、车辆速度等指标,以从多个方面的数据进行环岛锁死预警。还获取了环岛内所有车辆的实时位置和实时速度,可以对环岛的交通情况进行远程全息展示,方便交管部门实时了解环岛交通情况。实时监测环岛内的各个指标,能够提前发现交通负荷即将突破对应的承载能力,以及时进行相应的交通管理,预防环岛锁死。另外,在具体实施时不需要用任何额外的数据进行模型训练,极大地减低了成本,方便算法落地部署。
10、进一步,所述s10中,在获取点云数据之前,将多个激光雷达进行标定,得到标定参数。
11、有益效果是:提前标定完成激光雷达,能够保证所采集点云数据被准确映射至目标坐标中。
12、进一步,所述s10中,标定时,以utm平面坐标系为标定坐标系,通过计算激光雷达坐标系x-y平面到utm坐标系平面之间的单应性矩阵,利用单应性矩阵将每个激光雷达坐标系下点云数据的坐标(x,y)转换到utm坐标系下,将多个激光雷达坐标系下的点云转换到同一个坐标系下。
13、进一步,所述s20中,标定时,在激光雷达坐标系的x-y平面选取多个关键点,关键点数量至少选取四个,同时测量出关键点在地理空间中的经纬度,然后将测量的经纬度转换为utm坐标,就可以得到激光雷达x-y坐标系和utm坐标系的点对,最后计算这两个坐标系的单应性矩阵h,得到单应性矩阵后,将激光雷达x-y坐标系平面的点转换到utm坐标系可以表示为:
14、xutm=hxx-y。
15、进一步,所述s30中,目标检测的过程为:
16、s31,将每个路侧的激光雷达采集的道路上没有任何车辆以及行人的点云数据,作为道路背景点云,然后对背景点云进行栅格化处理,栅格化时每个栅格的高度、维度设置为无穷,每个栅格中保留落在这个栅格中所有点的最高点的高度,栅格化之后得到一个二维的栅格地图,对得到的栅格地图进行插值操作填补栅格地图上空白部分,构建一个密集的第一栅格地图,并进行存储以供后续使用;
17、s32,针对点云目标检测每输入一帧点云数据后,采用s31中的栅格化参数对输入点云进行栅格化,得到第二栅格地图,将第一栅格地图与第二栅格地图进行栅格差分,得到前景点云;
18、s33,利用标定好的单应性矩阵,将前景点云的(x,y)坐标从激光雷达x-y坐标系转换到utm坐标系,这个过程中前景点云的z坐标被舍弃,得到utm坐标系下的二维点云;
19、s34,对utm坐标系下的二维点云进行聚类,根据点之间的距离将每个目标区分开来;
20、s35,通过主成分分析法,以求取点集的特征向量得到外接框的轴方向,计算出带旋转角的外接包围框。
21、有益效果是:通过目标检测时的栅格处理,再插值填补空白,避免后续步骤的栅格差分过滤背景过滤效果差,对实际数据与第一栅格地图进行差分,精准去掉背景的干扰点云,能够提高目标检测的准确性。
22、进一步,所述s32中,差分高度阈值为0.05m,栅格化过程中栅格数量依据场景实际点云分布不同进行设定,点云栅格数量依据实际测量距离范围计算得到,计算策略则是栅格大小设定0.2m,而雷达测量距离范围纵向为负80m到80m、横向依据道路宽度设定;
23、每个栅格中要保留落在这个栅格中所有点的重心和最高点的高度,得到第二栅格地图。
24、有益效果是:根据实际进行栅格化数据的设定,能够进行栅格化与实际情况的精准对应。
25、进一步,所述s30中,目标检测结果表示为(x,y,l,w,r),其中,x、y表示目标车辆中心在俯视视图下的坐标,l、w表示车辆的长、宽,r为车辆的航向角,r的范围为(0,360°)。
26、有益效果是:以车辆检测的多个方面的参数作为检测位置,能够全面反馈车辆目标的位置情况。
27、进一步,所述s40中,采用空间原始点云映射对齐匹配融合,去除不同激光雷达扫描得到点云数据中的重复跟踪目标。
28、有益效果是:通过这种方法的对齐匹配融合,能够避免不同雷达同时重复追踪车辆目标的问题,防止重复跟踪造成的资源浪费以及环岛锁死的预警误差问题。
29、进一步,所述s50中,所述统计量包括实时车辆目标数量,以车辆速度比上环岛面积计算出环岛内车辆密度,根据目标追踪获取的车辆速度计算环岛区域内所有车辆的速度平均值,统计各个进出口的车辆流量。
30、有益效果是:统计量包括了多个车辆目标的参数,能够全面反应环岛区域的行驶情况,以精准提前预警环岛行驶情况。
技术研发人员:刘安民,王红钢,周金应,张强,夏芹,白林,李晓晖,谯杰,易茂,刘铮,杨杰,黄俊程
技术所有人:中国汽车工程研究院股份有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除