一种高枝果实的采摘方法与流程
本发明属于水果采摘工具,特别涉及一种高枝果实的采摘方法。
背景技术:
1、对高大树木上的果实进行采收,往往需要借助带采摘头的手持杆。如中国专利文献cn108718696a公开的一种多种水果采集辅助装置,其主体为一伸缩杆,使用前先将伸缩杆调整至合适长度,通过肉眼和摄像头将水果套入外壳内,然后轻轻拉动伸缩杆使果梗滑入剪切口,拉紧主拉线带动剪刀进行剪切动作,伸缩杆顶部的摄像头能更清楚地实时反映树上的情况,通过伸缩杆上的手机观看,有助于抓剪时的精确性。在其剪切模式下,由于需要把果梗卡入v型缺口、再通过拉线带动剪刀开合,操作相对不便;而在其摘取模式时,则容易夹住果实周围的枝叶,把枝叶也一并扯下。
2、中国专利文献cn108307794a提出的技术方案也采用剪刀对果梗进行剪切,但剪刀的驱动方式有所改进,其公开了一种自动摘果装置,包括具有万向轮的装置主体,其上设置储果箱和伸缩杆,伸缩杆顶部设置放置槽,放置槽内壁固定安装有海绵缓冲块,且剪刀位于放置槽的内壁顶部,通过按压驱动按钮使驱动器驱动剪刀剪取果实,掉落的果实沿管道流入储果腔。该方案虽然能进一步减轻人工劳动强度,提高操作的便利性,但其剪刀的剪切容易伤及果实和果实周围的枝条、枝叶。
3、现有技术也存在非剪刀式的切割刀头,如cn107493829a公开的方案,其在圆柱形外壳的顶部设计有条形切割开口,使用者利用切割开口将果实上端的树枝部分置于2个锯片之间,在锯片的切割作用下,果实被切割下来落入进料斗。该方案中,由于果子的枝条容易水平晃动,条形切割开口扣入果子枝条的操作实际较难;其次,也容易把相邻的枝条一并卡入条形切割开口,造成对不相干枝条的伤害。
技术实现思路
1、本申请为克服现有技术的不足,提出一种高枝果实的采摘方法,基于利用结构改进的手持杆,以期在提高采摘效率的同时,减少对周围果实、枝条、枝叶的伤害概率。
2、本发明解决所述技术问题的方案是:
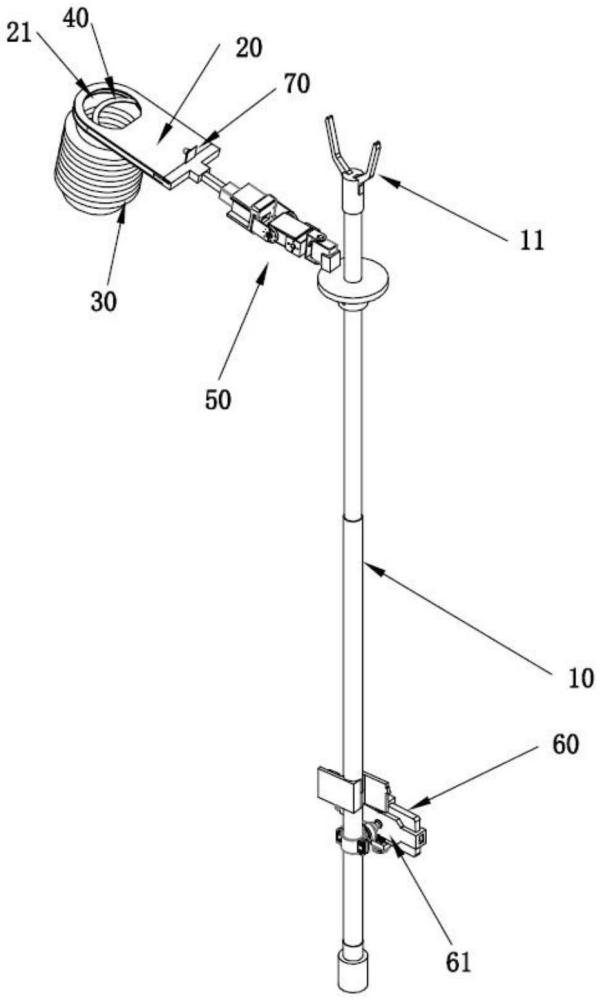
3、一种高枝果实的采摘方法,手持杆为顶部设有枝条叉的电动伸缩杆,手持杆的上部具有带摄像头的采摘臂,采摘臂的端部具有带有缓冲输送管的采摘头,手持杆的下部设置控制平台,包括如下步骤:
4、s1、树枝的选定与叉起:利用手持杆顶部的枝条叉叉住一根树枝,通过控制平台使手持杆伸长从而使被选定的树枝上的果实露出树冠;
5、s2、采摘头定位果实:在摄像头辅助下,通过控制平台移动采摘臂,使采摘头上的采摘头套住露出树冠的果实;
6、s3、果实分离与下落:通过控制平台控制采摘头的刀片将果梗切断,果实沿着缓冲输送管下落;
7、s4、重复摘果:重复步骤s2-s3,将被叉起枝条上果实按需摘取;
8、s5、枝条重定位:通过控制平台使手持杆缩短使被叉起的树枝复原,再重复步骤s1-s4。
9、作为改进,所述采摘头为具有果实入口的平板状结构,利用果实入口之外的平板部分挡住果实旁边的其他枝叶,防止其他枝叶进入果实入口后被切断;果实入口处配设刀片,刀片在刀片驱动机构的驱动下仅在果实入口内部移动。
10、作为进一步改进,所述刀片驱动机构包括与刀片连接的推杆,推杆由推杆电机驱动,采摘臂上具有用于固定采摘头的采摘头连接件,推杆电机和部分推杆位于采摘头连接件的内部。
11、作为改进,所述采摘臂具有水平调节关节和竖直调节关节,水平调节关节和竖直调节关节分别由一舵机控制,舵机由控制平台控制。
12、作为进一步改进,所述缓冲输送管由若干段波纹管装配而成,有利于减缓果实的下落速度。
13、作为改进,所述缓冲输送管连通一储果仓,储果仓呈底部带有滚轮的仓体,储果仓配设手推杆。
14、作为进一步改进,所述储果仓在与缓冲输送管的连通处设置一缓冲腔,缓冲腔具有一与缓冲输送管底端正对的弹性缓冲壁,缓冲腔的底部为果实出口,果实出口处设有一引导片。缓冲腔有利于进一步降低果实进入到储果仓的速度,果实不易被砸伤。
15、综上所述,本发明利用枝条叉和采摘臂的配合,将挂满果实的枝条叉起后采摘,使果实露出于树冠之上,方便采摘头将果实一一取下。其次,改进了采摘头的结构,使其呈平板状,有利于阻挡果实周围的枝叶进入果实入口。当果实进入果实入口后,刀片沿果实入口所在平面移动,即可将果梗切断,操作简单易行,既提高了采摘效率,又可减少对果实、枝条、枝叶的伤害概率。
技术特征:
1.一种高枝果实的采摘方法,其特征在于:手持杆为顶部设有枝条叉的电动伸缩杆,手持杆的上部具有带摄像头的采摘臂,采摘臂的端部具有带有缓冲输送管的采摘头,手持杆的下部设置控制平台,包括如下步骤:
2.如权利要求1所述的一种高枝果实的采摘方法,其特征在于:所述采摘头为具有果实入口的平板状结构,利用果实入口之外的平板部分挡住果实旁边的其他枝叶,防止其他枝叶进入果实入口后被切断;果实入口处配设刀片,刀片在刀片驱动机构的驱动下仅在果实入口内部移动。
3.如权利要求2所述的一种高枝果实的采摘方法,其特征在于:所述刀片驱动机构包括与刀片连接的推杆,推杆由推杆电机驱动,采摘臂上具有用于固定采摘头的采摘头连接件,推杆电机和部分推杆位于采摘头连接件的内部。
4.如权利要求1所述的一种高枝果实的采摘方法,其特征在于:所述采摘臂具有水平调节关节和竖直调节关节,水平调节关节和竖直调节关节分别由一舵机控制,舵机由控制平台控制。
5.如权利要求1所述的一种高枝果实的采摘方法,其特征在于:所述缓冲输送管由若干段波纹管装配而成。
6.如权利要求1所述的一种高枝果实的采摘方法,其特征在于:所述缓冲输送管连通一储果仓,储果仓呈底部带有滚轮的仓体,储果仓配设手推杆。
7.如权利要求6所述的一种高枝果实的采摘方法,其特征在于:所述储果仓在与缓冲输送管的连通处设置一缓冲腔,缓冲腔具有一与缓冲输送管底端正对的弹性缓冲壁,缓冲腔的底部为果实出口,果实出口处设有一引导片。
技术总结
本发明属于水果采摘工具技术领域,特别涉及一种高枝果实的采摘方法,包括如下步骤:S1、树枝的选定与叉起:利用手持杆顶部的枝条叉叉住一根树枝,通过控制平台使手持杆伸长从而使被选定的树枝上的果实露出树冠;S2、采摘头定位果实:在摄像头辅助下,通过控制平台移动采摘臂,使采摘头上的采摘头套住露出树冠的果实;S3、果实分离与下落:通过控制平台控制采摘头的刀片将果梗切断,果实沿着缓冲输送管下落;S4、重复摘果:重复步骤S2‑S3,将被叉起枝条上果实按需摘取;S5、枝条重定位:通过控制平台使手持杆缩短使被叉起的树枝复原,再重复步骤S1‑S4。本发明既提高了采摘效率,又可减少对果实、枝条、枝叶的伤害概率。
技术研发人员:徐郅淏,朱杰煦,曹李越,张家铭,费佳浩,钟奕辰
受保护的技术使用者:湖州市吴兴实验中学
技术研发日:
技术公布日:2024/8/27
技术研发人员:徐郅淏,朱杰煦,曹李越,张家铭,费佳浩,钟奕辰
技术所有人:湖州市吴兴实验中学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除