一种可精准定位式割胶设备及割胶方法
本发明涉及割胶领域,尤其涉及一种可精准定位式割胶设备及割胶方法。
背景技术:
1、在橡胶生产领域,传统的割胶方法主要依靠人工完成。劳动者使用手工工具沿着橡胶树的树皮割出细长的割痕,以引导橡胶树脂流出。这种方式虽然简单,但效率极低,且对劳动者的技术要求较高,不一致的割痕深度和方向会影响产量和树木的健康。
2、为了提高效率,出现了“一机一树”的固定式割胶机器人。这些机器人被固定在单棵树上,能够自动割胶,减少了人工割胶的劳动强度和技术要求。然而,它们无法自主移动,每次割胶作业结束后需要人工移至下一棵树。这样就大大限制了生产效率,且增加了人工成本。
3、随后,市场上出现了全自走式割胶机器人,这些机器人能够在橡胶林中自主移动,寻找树木并进行割胶作业。尽管它们在自主性和灵活性上有了显著提升,但在树体定位和割胶精度上仍有不足。自走式机器人常因为定位不精确导致割胶效果不理想,且在固定和释放机器时还需外部干预,这不仅降低了作业效率,也增加了机械故障的风险。
技术实现思路
1、为解决以上技术问题,本发明提供一种定位快速、准确、稳定的可精准定位式自走机器人割胶设备及割胶方法。
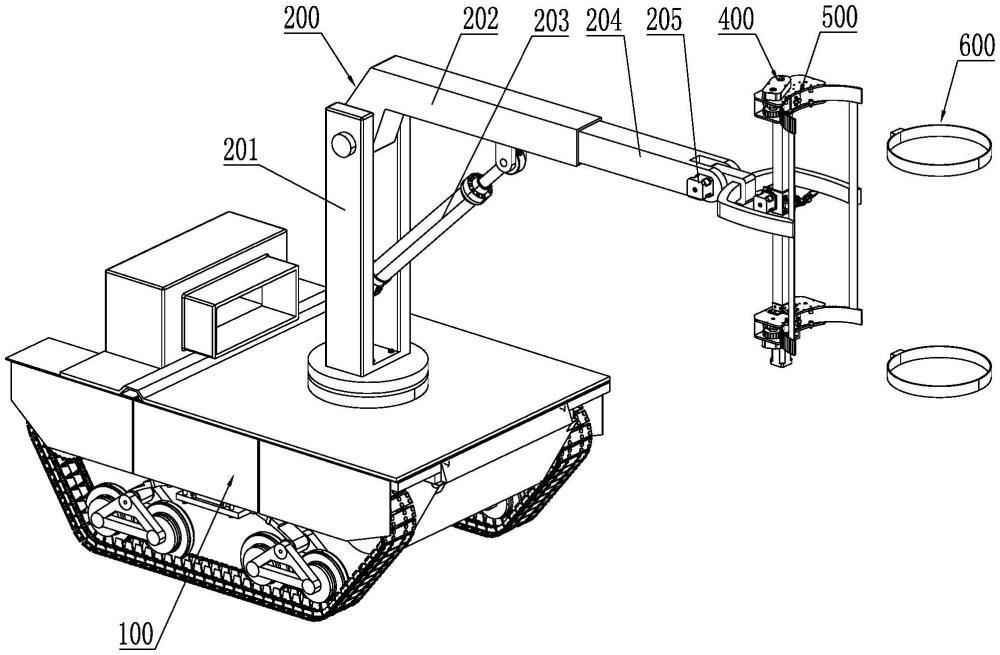
2、为解决上述技术问题,本发明的技术方案是:一种可精准定位式割胶设备,包括履带自走机器人和安装在所述履带自走机器人平台上的伸缩旋转机构,所述伸缩旋转机构的自由端安装有齿轨架,所述齿轨架的顶端与底端分别安装有弧形齿轨,所述弧形齿轨的弧形外表面安装有割胶装置,所述割胶装置包括与所述弧形齿轨啮合的割胶运动模组,所述割胶运动模组上安装有割胶升降模组,所述割胶升降模组上安装有割刀模组;所述弧形齿轨的弧形内表面中部固定安装有轨架定位装置,所述轨架定位装置上对应可拆卸插接安装有环树定位装置;
3、所述轨架定位装置包括固定在所述齿轨架上的定位座,所述定位座上设有对接引导结构、插接触发结构、旋转防脱结构,所述插接触发结构与所述旋转防脱结构之间信号连接;所述环树定位装置包括预环抱固定于橡胶树上的环体固定结构和固定安装在所述环体固定结构上的环体定位结构;所述对接引导结构用于引导所述轨架定位装置朝向所述环体定位结构的中心靠拢,辅助所述插接触发结构、所述旋转防脱结构准确插接至所述环体定位机构内,所述插接触发结构插接到位后产生触发信号控制所述旋转防脱结构旋转动作,所述旋转防脱结构与所述插接触发结构之间互锁固定于所述环体定位结构内;
4、所述履带自走机器人上安装有控制识别系统,所述伸缩旋转机构、所述割胶装置、所述旋转防脱结构均连接于所述控制识别系统。
5、作为优选的技术方案,所述对接引导结构包括固定安装在所述定位座顶端、两侧的对接引导板,所述对接引导板与所述环体定位结构的顶端面、两侧端面对应贴合,所述对接引导板的外端设有向外倾斜的对接引导面,所述对接引导面引导所述轨架定位装置的中心靠近所述环体定位结构的中心。
6、作为优选的技术方案,所述插接触发结构包括固定安装在所述定位座表面的触发开关,所述触发开关的按压端固定安装有水平设置的插接定位柱,所述插接定位柱的外端设有锥形定位端,所述插接定位柱的下部设有互锁缺槽。
7、作为优选的技术方案,所述旋转防脱结构包括固定安装在所述定位座表面的旋转电机,所述旋转电机的输出端水平设置位于所述轨架定位装置的中心,且输出端朝向所述环体固定结构一侧固定安装有椭圆防脱块,所述椭圆防脱块水平时,可插入或退出所述环体固定结构内,所述椭圆防脱块竖向时,插入至所述互锁缺槽内、与所述插接定位柱互锁固定于所述环体固定结构内。
8、作为优选的技术方案,所述触发开关被触发后,所述旋转电机旋转90°,带动所述椭圆防脱块水平或竖向。
9、作为优选的技术方案,所述定位座表面的底端固定有水平设置的辅助插接柱,所述环树定位装置上设有与所述辅助插接柱对应插接配合的辅助插接孔。
10、作为优选的技术方案,所述环体定位结构包括与所述环体固定结构固定的环体安装座,所述环体安装座的外端设有定位安装板,所述环体安装座与所述定位安装板之间形成有防脱互锁腔,所述定位安装板的表面中心设有与所述旋转防脱结构对应的椭圆防脱孔,所述定位安装板的表面设有与所述插接触发结构进行插接配合的插接定位孔,所述插接定位孔的外侧为向外扩的锥形结构,所述环体安装座的内表面设有与所述插接触发结构进行抵靠配合的触发平面。
11、作为优选的技术方案,所述伸缩旋转机构包括旋转安装在所述履带自走机器人上的旋转立柱,所述旋转立柱的顶端转动安装有摆臂,所述旋转立柱与所述摆臂之间设有驱动所述摆臂上下摆动的摆臂驱动缸,所述摆臂的前端内还安装有伸缩臂,所述摆臂与所述伸缩臂内安装有伸缩臂驱动缸,所述齿轨架通过转轴安装在所述伸缩臂驱动缸的前端,所述伸缩臂上安装有驱动所述转轴上下摆动的齿轨架驱动缸。
12、作为优选的技术方案,所述割胶运动模组包括上下两齿轮座体,所述齿轮座体内安装有与所述弧形齿轨传动啮合的运动齿轮,所述运动齿轮通过转轴转动安装于所述齿轮座体上,所述齿轮座体上还设有用于限位安装所述弧形齿轨的防脱滚轴,所述齿轮座体上还固定安装有齿轮电机,所述齿轮电机的动力轴与所述运动齿轮之间传动连接;
13、所述割胶升降模组包括固定连接在两所述齿轮座体之间的升降支撑轨道,两所述齿轮座体之间还转动连接有升降丝杠,所述升降丝杠与所述升降支撑轨道平行,所述割刀模组滑动安装在所述升降支撑轨道上,所述割刀模组与所述升降丝杠之间螺纹连接,其中一所述齿轮座体上还固定安装有升降电机,所述升降电机的动力轴与所述升降丝杠的一端固定连接;
14、所述割刀模组包括滑动安装在所述升降支撑轨道上的割刀安装座,所述割刀安装座上通过割刀转轴转动安装有割刀支架,所述割刀支架与所述割刀安装座之间安装有复位弹簧,所述复位弹簧迫使所述割刀支架绕所述割刀转轴摆动靠近天然橡胶树表面,所述割刀支架的外端固定安装有割胶刀。
15、作为优选的技术方案,割胶方法,采用上述一种可精准定位式割胶设备,包括如下步骤:
16、步骤一、所述控制识别系统控制所述履带自走机器人停靠在绑定有所述环体固定结构的橡胶树前,调整所述履带自走机器人以及所述伸缩旋转机构的位姿状态,使得所述轨架定位装置与所述环树定位装置相对、中心位置大致接近;
17、步骤二、所述伸缩旋转机构伸长,带动所述齿轨架朝向橡胶树一侧靠近,首先所述对接引导结构引导所述轨架定位装置朝向所述环体定位结构的中心靠拢,辅助所述插接触发结构、所述旋转防脱结构准确插接至所述环体定位机构内,所述插接触发结构插接到位后产生触发信号控制所述旋转防脱结构旋转动作,所述旋转防脱结构与所述插接触发结构之间互锁固定于所述环体定位结构内,完成自动锁定防脱,所述弧形齿轨完成固定,且与橡胶树表面弧形配合;
18、步骤三、所述伸缩旋转机构反向拉动所述齿轨架整体远离所述环树定位装置一小段行程,此时触发信号断开,所述割胶装置开始割胶作业,割胶作业完成后,所述伸缩旋转机构带动所述齿轨架继续靠近所述环树定位装置,所述插接触发结构再次产生触发信号,所述旋转防脱结构反向旋转复位动作,所述旋转防脱结构与所述插接触发结构之间锁定解除,完成锁定解除;
19、步骤四、最后,所述伸缩旋转机构带动所述齿轨架远离、完全脱离所述环树定位装置,割胶完成。
20、由于采用了上述技术方案,本发明的有益效果是:
21、本发明融合了“一机一树”固定式割胶机的稳定性、精确割胶模式以及全自走式割胶机器人的自主性和灵活性,实现了真正的自动化割胶;机器人不仅能自主导航至目标橡胶树,而且能通过对接引导结构、插接触发结构、旋转防脱结构等结构的配合使用,快速、精确地与树体固定,同时还具有防脱功能,可以保证割胶作业时的安全性、精准性;其可伸缩、360°旋转的定位装置的设计使得割胶作业可以在没有人工干预的情况下连续进行,大大提高了割胶的效率和质量;同时,本设备在完成割胶作业后能够自动解除连接,无需人工干预即可转移到下一棵树,减少了劳动力成本的同时,也减少了作业过程中对橡胶树的损伤,有助于橡胶种植业的可持续发展。
技术研发人员:刘俊孝,孙鹤鸣,张喜瑞,张志富,赵浩然,许瑞武
技术所有人:海南大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除