一种菱角自动剥壳装置
本发明涉及菱角剥壳结构设计领域,尤其是涉及菱角批量剥壳处理的一种菱角自动剥壳装置。
背景技术:
1、菱角,又叫菱,其整体外形呈弯牛角形,成熟后的菱角的果壳较硬,角中带刺,尖细而脆,长在角尖。菱角的果肉呈白色,元宝形、两角钝,富含丰富的钾、磷、镁等营养元素,维生素c、胡萝卜素、钙等营养成分也较高,既可生食,也可熟食,味道甘甜、可口,同时,还具有健脾益气等药用价值。
2、由于成熟后的菱角的果壳较硬,且角中带刺,在日常的小批量食用时,主要是依靠人力对单个的菱角进行手动剥壳,当果壳打开后,再从果壳中取出果肉来食用,不仅费时费力,剥壳效率低下,而且在剥壳过程中容易被菱角两端的角尖刺扎伤,故存在一定的操作危险性。当果壳打开后,果肉与果壳之间的分离也比较麻烦,尤其是生食菱角时,壳肉分离效率低,甚至在菱角剥壳之后的壳腔中还残留一定的果肉,从而造成果肉不必要的浪费。因此,单纯依靠人力对单个的菱角进行手动剥壳的作业方式,不仅剥壳作业效率低下,而且存在一定的安全隐患,菱角剥壳后的壳肉分离效率、分离质量均不能保证,从而无法满足菱角批量化剥壳处理的效率和质量需求。
技术实现思路
1、本发明要解决的技术问题是:针对现有技术存在的问题,提供一种菱角自动剥壳装置,提高菱角批量化处理的剥壳作业效率和作业安全性。
2、本发明要解决的技术问题采用以下技术方案来实现:一种菱角自动剥壳装置,包括菱角环切机构和壳肉分离机构,所述的菱角环切机构包括第一切刀和第二切刀,所述的第一切刀安装在第一环切刀架上,所述的第二切刀安装在第二环切刀架上,所述第一切刀、第二切刀的刀刃开口部位均为弧形结构,且第一切刀上的刀刃开口部位与第二切刀上的刀刃开口部位相对设置,所述的第一切刀与第二切刀之间通过刀架驱动机构形成相对合拢或者相对分开运动,且在第一切刀与第二切刀相对合拢运动过程中对菱角形成环切动作,经过环切后的菱角通过壳肉分离机构进行剥壳作业。
3、进一步地,所述的刀架驱动机构包括主推杆及其驱动机构,所述的主推杆分别与第一滑块、第二滑块形成滑动配合结构,所述的第一滑块分别与第一环切连杆一端、第二环切连杆一端形成相对转动的活动连接结构,所述第一环切连杆的另一端与环切支座形成活动连接结构,所述第二环切连杆的另一端与第一环切刀架形成活动连接结构;所述的第二滑块分别与第三环切连杆一端、第四环切连杆一端形成相对转动的活动连接结构,所述第三环切连杆的另一端与环切支座形成活动连接结构,所述第四环切连杆的另一端与第二环切刀架形成活动连接结构;所述的主推杆在其驱动机构作用下相对于环切支座作水平直线运动,并通过第一滑块驱动第一环切刀架、通过第二滑块驱动第二环切刀架,所述的第一环切刀架带动第一切刀、第二环切刀架带动第二切刀,并使第一切刀与第二切刀之间在相对合拢运动过程中形成环切动作。
4、进一步地,还包括菱角正姿机构,所述的菱角正姿机构包括正姿板、正姿凸轮及其驱动机构,所述的正姿凸轮与正姿连架杆一端形成相对转动的活动连接结构,所述正姿连架杆的另一端与第一摇杆形成相对转动的活动连接结构;所述的正姿板分别与第一摇杆一端、第二摇杆一端形成相对转动的活动连接结构,所述第一摇杆的另一端、第二摇杆的另一端分别与正姿安装座形成相对转动的活动连接结构。
5、进一步地,所述的菱角正姿机构还包括限流板,所述的限流板与正姿顶杆连接,所述的正姿顶杆在正姿凸轮驱动下相对于正姿安装座作往复直线运动。
6、进一步地,还包括菱角压模机构,所述的菱角压模机构包括柔性轮及其升降驱动机构,所述的柔性轮安装在柔性轮支架上、且相对于柔性轮支架转动,所述的柔性轮支架通过压模连杆与压模导轨连接;所述柔性轮的升降驱动机构包括第一悬臂、第一压模凸轮及压模驱动机构,所述的第一悬臂通过第一连接轴与压模安装座活动连接,且第一悬臂分别与第一滚子、第二滚子连接,所述的第一滚子与压模导轨之间形成相对直线滑动配合结构;所述的第一压模凸轮在压模驱动机构作用下相对于压模安装座转动,并通过第二滚子驱动第一悬臂,所述的第一悬臂驱动柔性轮相对于压模安装座在一定范围内升降运动。
7、进一步地,所述的菱角压模机构还包括柔性轮伸缩驱动机构,所述的柔性轮伸缩驱动机构包括第二悬臂、压模滑块和第二压模凸轮,所述的第二悬臂通过第二连接轴与压模安装座活动连接,且第二悬臂分别与第三滚子、第四滚子连接,所述的第四滚子与压模滑块之间形成活动连接结构;所述的第二压模凸轮在压模驱动机构作用下相对于压模安装座转动,并通过第三滚子驱动第二悬臂,所述的第二悬臂驱动柔性轮相对于压模安装座在一定范围内伸缩运动。
8、进一步地,所述的壳肉分离机构包括第一分离模具、第二分离模具及模具分离驱动机构、第一夹爪及其驱动机构和第二夹爪及其驱动机构,所述的第一分离模具、第二分离模具上共同形成菱角仿形凹槽,所述的第一夹爪在其驱动机构作用下、第二夹爪在其驱动机构作用下均相对于菱角仿形凹槽同步形成夹持动作。
9、进一步地,所述的模具分离驱动机构包括分离推板及其驱动机构,所述分离推板的相对两端分别与第一推杆一端、第二推杆一端形成相对转动的活动连接结构,所述第一推杆的另一端与第一分离模具连接,所述第二推杆的另一端与第二分离模具连接;所述的分离推板在其驱动机构作用下转动,通过第一推杆驱动第一分离模具、第二推杆驱动第二分离模具,直至第一分离模具与第二分离模具相互分开到位。
10、进一步地,所述第一夹爪的驱动机构包括第三电动推杆,所述的第一分离模具与第一悬臂杆一端固定连接,所述第一悬臂杆的另一端与第一夹爪之间形成活动连接结构,所述第三电动推杆的动作输出端与第一夹爪一端形成活动连接结构,所述第一夹爪的另一端形成夹持端。
11、进一步地,所述第二夹爪的驱动机构包括第二电动推杆,所述的第二分离模具与第二悬臂杆一端固定连接,所述第二悬臂杆的另一端与第二夹爪之间形成活动连接结构,所述第二电动推杆的动作输出端与第二夹爪一端形成活动连接结构,所述第二夹爪的另一端形成夹持端。
12、与现有技术相比,本发明的有益效果是:通过将第一切刀、第二切刀的刀刃开口部位设置成弧形结构、并使第一切刀上的刀刃开口部位与第二切刀上的刀刃开口部位相对设置,当菱角进入到第一切刀与第二切刀所共同形成的加工空间时,通过刀架驱动机构来驱动第一切刀与第二切刀之间形成相对合拢运动,在此不断合拢运动过程中,由第一切刀、第二切刀即可形成环切动作,利用该环切动作即可一次性完成对菱角进行环切作业,经过环切作业后的菱角再通过壳肉分离机构进行剥壳作业,从而完成菱角的自动剥壳作业,完全避免了人工操作剥壳作业,有效避免了菱角两端的尖刺所造成的刺伤等安全隐患,极大地提高了菱角剥壳作业效率和作业安全性,尤其适合菱角批量化剥壳作业。
技术特征:
1.一种菱角自动剥壳装置,其特征在于:包括菱角环切机构(7)和壳肉分离机构(8),所述的菱角环切机构(7)包括第一切刀(707)和第二切刀(708),所述的第一切刀(707)安装在第一环切刀架(706)上,所述的第二切刀(708)安装在第二环切刀架(709)上,所述第一切刀(707)、第二切刀(708)的刀刃开口部位均为弧形结构,且第一切刀(707)上的刀刃开口部位与第二切刀(708)上的刀刃开口部位相对设置,所述的第一切刀(707)与第二切刀(708)之间通过刀架驱动机构形成相对合拢或者相对分开运动,且在第一切刀(707)与第二切刀(708)相对合拢运动过程中对菱角形成环切动作,经过环切后的菱角通过壳肉分离机构(8)进行剥壳作业。
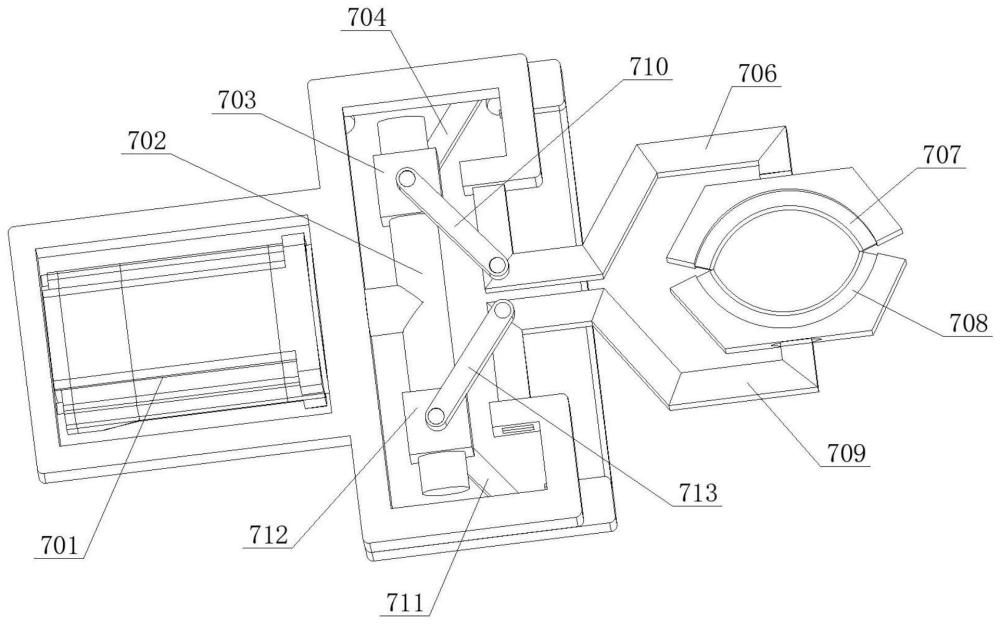
2.根据权利要求1所述的菱角自动剥壳装置,其特征在于:所述的刀架驱动机构包括主推杆(702)及其驱动机构,所述的主推杆(702)分别与第一滑块(703)、第二滑块(712)形成滑动配合结构,所述的第一滑块(703)分别与第一环切连杆(704)一端、第二环切连杆(710)一端形成相对转动的活动连接结构,所述第一环切连杆(704)的另一端与环切支座(705)形成活动连接结构,所述第二环切连杆(710)的另一端与第一环切刀架(706)形成活动连接结构;所述的第二滑块(712)分别与第三环切连杆(711)一端、第四环切连杆(713)一端形成相对转动的活动连接结构,所述第三环切连杆(711)的另一端与环切支座(705)形成活动连接结构,所述第四环切连杆(713)的另一端与第二环切刀架(709)形成活动连接结构;所述的主推杆(702)在其驱动机构作用下相对于环切支座(705)作水平直线运动,并通过第一滑块(703)驱动第一环切刀架(706)、通过第二滑块(712)驱动第二环切刀架(709),所述的第一环切刀架(706)带动第一切刀(707)、第二环切刀架(709)带动第二切刀(708),并使第一切刀(707)与第二切刀(708)之间在相对合拢运动过程中形成环切动作。
3.根据权利要求1所述的菱角自动剥壳装置,其特征在于:还包括菱角正姿机构(3),所述的菱角正姿机构(3)包括正姿板(307)、正姿凸轮(303)及其驱动机构,所述的正姿凸轮(303)与正姿连架杆(304)一端形成相对转动的活动连接结构,所述正姿连架杆(304)的另一端与第一摇杆(305)形成相对转动的活动连接结构;所述的正姿板(307)分别与第一摇杆(305)一端、第二摇杆(306)一端形成相对转动的活动连接结构,所述第一摇杆(305)的另一端、第二摇杆(306)的另一端分别与正姿安装座(301)形成相对转动的活动连接结构。
4.根据权利要求3所述的菱角自动剥壳装置,其特征在于:所述的菱角正姿机构(3)还包括限流板(308),所述的限流板(308)与正姿顶杆(302)连接,所述的正姿顶杆(302)在正姿凸轮(303)驱动下相对于正姿安装座(301)作往复直线运动。
5.根据权利要求1所述的菱角自动剥壳装置,其特征在于:还包括菱角压模机构(6),所述的菱角压模机构(6)包括柔性轮(601)及其升降驱动机构,所述的柔性轮(601)安装在柔性轮支架(621)上、且相对于柔性轮支架(621)转动,所述的柔性轮支架(621)通过压模连杆(612)与压模导轨(603)连接;所述柔性轮(601)的升降驱动机构包括第一悬臂(609)、第一压模凸轮(608)及压模驱动机构,所述的第一悬臂(609)通过第一连接轴(606)与压模安装座(604)活动连接,且第一悬臂(609)分别与第一滚子(602)、第二滚子(605)连接,所述的第一滚子(602)与压模导轨(603)之间形成相对直线滑动配合结构;所述的第一压模凸轮(608)在压模驱动机构作用下相对于压模安装座(604)转动,并通过第二滚子(605)驱动第一悬臂(609),所述的第一悬臂(609)驱动柔性轮(601)相对于压模安装座(604)在一定范围内升降运动。
6.根据权利要求5所述的菱角自动剥壳装置,其特征在于:所述的菱角压模机构(6)还包括柔性轮(601)伸缩驱动机构,所述的柔性轮(601)伸缩驱动机构包括第二悬臂(617)、压模滑块(610)和第二压模凸轮(615),所述的第二悬臂(617)通过第二连接轴(613)与压模安装座(604)活动连接,且第二悬臂(617)分别与第三滚子(614)、第四滚子(618)连接,所述的第四滚子(618)与压模滑块(610)之间形成活动连接结构;所述的第二压模凸轮(615)在压模驱动机构作用下相对于压模安装座(604)转动,并通过第三滚子(614)驱动第二悬臂(617),所述的第二悬臂(617)驱动柔性轮(601)相对于压模安装座(604)在一定范围内伸缩运动。
7.根据权利要求1所述的菱角自动剥壳装置,其特征在于:所述的壳肉分离机构(8)包括第一分离模具(806)、第二分离模具(809)及模具分离驱动机构、第一夹爪(808)及其驱动机构和第二夹爪(810)及其驱动机构,所述的第一分离模具(806)、第二分离模具(809)上共同形成菱角仿形凹槽(817),所述的第一夹爪(808)在其驱动机构作用下、第二夹爪(810)在其驱动机构作用下均相对于菱角仿形凹槽(817)同步形成夹持动作。
8.根据权利要求7所述的菱角自动剥壳装置,其特征在于:所述的模具分离驱动机构包括分离推板(811)及其驱动机构,所述分离推板(811)的相对两端分别与第一推杆(813)一端、第二推杆(812)一端形成相对转动的活动连接结构,所述第一推杆(813)的另一端与第一分离模具(806)连接,所述第二推杆(812)的另一端与第二分离模具(809)连接;所述的分离推板(811)在其驱动机构作用下转动,通过第一推杆(813)驱动第一分离模具(806)、第二推杆(812)驱动第二分离模具(809),直至第一分离模具(806)与第二分离模具(809)相互分开到位。
9.根据权利要求7所述的菱角自动剥壳装置,其特征在于:所述第一夹爪(808)的驱动机构包括第三电动推杆(807),所述的第一分离模具(806)与第一悬臂杆(815)一端固定连接,所述第一悬臂杆(815)的另一端与第一夹爪(808)之间形成活动连接结构,所述第三电动推杆(807)的动作输出端与第一夹爪(808)一端形成活动连接结构,所述第一夹爪(808)的另一端形成夹持端。
10.根据权利要求7所述的菱角自动剥壳装置,其特征在于:所述第二夹爪(810)的驱动机构包括第二电动推杆(801),所述的第二分离模具(809)与第二悬臂杆(816)一端固定连接,所述第二悬臂杆(816)的另一端与第二夹爪(810)之间形成活动连接结构,所述第二电动推杆(801)的动作输出端与第二夹爪(810)一端形成活动连接结构,所述第二夹爪(810)的另一端形成夹持端。
技术总结
本发明提供一种菱角自动剥壳装置,包括菱角环切机构和壳肉分离机构,其中的菱角环切机构包括第一切刀和第二切刀,第一切刀安装在第一环切刀架上,第二切刀安装在第二环切刀架上,第一切刀、第二切刀的刀刃开口部位均为弧形结构,第一切刀上的刀刃开口部位与第二切刀上的刀刃开口部位相对设置,第一切刀与第二切刀之间通过刀架驱动机构形成相对合拢或相对分开运动,且在第一切刀与第二切刀相对合拢运动过程中对菱角形成环切动作,经过环切后的菱角通过壳肉分离机构进行剥壳作业。采用本发明可一次性完成菱角环切,完全避免人工操作剥壳作业,有效避免了菱角两端的尖刺所造成的刺伤等安全隐患,极大提高了菱角剥壳作业效率和作业安全性。
技术研发人员:胡永阳,孙亮波,刘文朝,王泽安,章德平
受保护的技术使用者:武汉轻工大学
技术研发日:
技术公布日:2024/7/29
技术研发人员:胡永阳,孙亮波,刘文朝,王泽安,章德平
技术所有人:武汉轻工大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除