一种基于归一化最小均方的主动降噪方法与流程
本发明涉及汽车主动降噪领域,具体涉及一种基于归一化最小均方的主动降噪方法。
背景技术:
1、随着工业生产、交通运输、城市建筑的发展以及人口密度的增加,环境噪声日益严重,已成为污染人类社会环境的一大公害。噪声具有局部性、暂时性和多发性的特点。噪声不仅会在生理上影响听力和神经系统,而且在心理上使人烦躁容易造成安全隐患。
2、在乘坐汽车时,特别是车速较高时,车内噪声很高,主要是发动机舱噪声、胎噪声、空气涡流噪声等几个方面,在打开车窗时,风噪声会非常严重。强烈的噪声不利于乘客在车内沟通交流,且较长时间在噪声环境下驾驶,非常容易引起疲劳。
3、目前,路噪主动降噪方法已经成为汽车车内噪声控制的研究热点。该方法主要是通过在底盘点布置振动加速度,车内布置误差麦克风的方式实现,通过车内声源发声以声消声的方式,人为地在车内附加与路噪反相的控制声波,从而降低车内路噪。
4、相关技术中,上述主动降噪方法根据不同工况和环境可能会产生不同的结果,如在遇到路面冲击或者开关车门等工况时,会出现系统发散的问题,导致控制精度低。
技术实现思路
1、本申请提供一种基于归一化最小均方的主动降噪方法,解决相关技术中因不同工况和环境导致系统发散、控制精度低的技术问题。
2、本申请实施例提供一种基于归一化最小均方的主动降噪方法,其包括以下步骤:
3、布置汽车主动降噪系统,所述汽车主动降噪系统包括设于车内的误差麦克风、设于底盘的参考传感器、以及设于车内的路噪主动控制器,所述路噪主动控制器分别与所述误差麦克风和所述参考传感器连接;
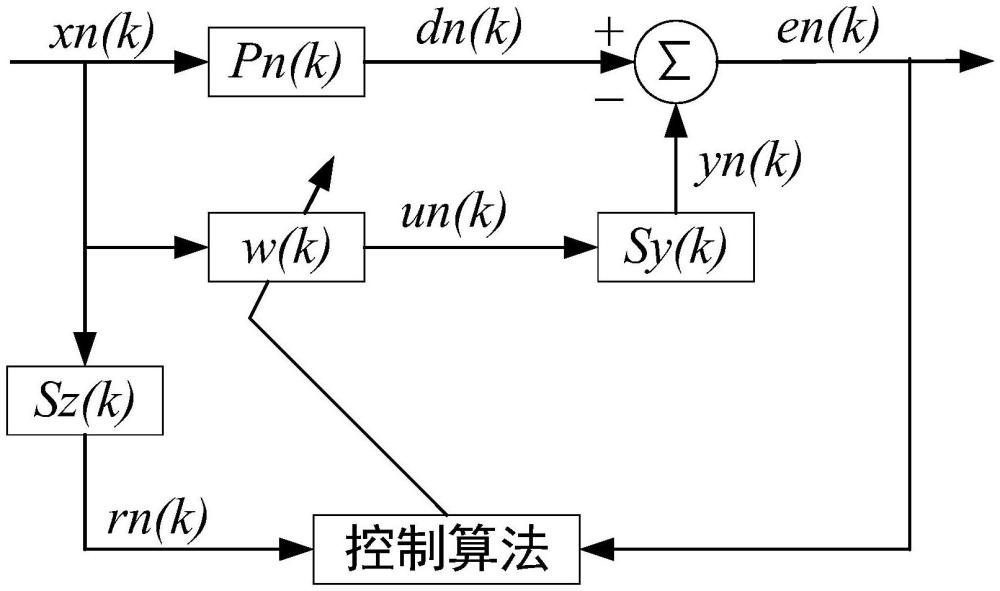
4、路噪数据采集,所述误差麦克风采集车内噪声信号en传输至所述路噪主动控制器,作为误差信号;所述参考传感器采集不同位置的参考加速度信号xn传输至所述路噪主动控制器,作为输入信号,所述路噪主动控制器的输出信号为un;
5、路噪数据处理,基于归一化最小均方算法,所述路噪主动控制器根据所述车内噪声信号en和参考加速度信号xn设定步长因子μ,所述步长因子μ随所述参考加速度信号xn变化而变化,所述路噪主动控制器的输出信号为un;
6、根据所述输出信号un或参考加速度信号xn或车内噪声信号en的阈值,设定其对应的控制值。
7、在一种实施方式中,所述步长因子μ随所述参考加速度信号xn变化而变化,表达为:
8、其中,μ0为参考步长因子。
9、在一种实施方式中,所述参考步长因子的范围为(0.001,0.1)。
10、在一种实施方式中,所述步长因子的范围为(-1,1)。
11、在一种实施方式中,所述根据所述输出信号un的阈值,设定其对应的控制值包括:
12、当所述输出信号un大于阈值时,输出为0;
13、表达为:
14、其中,umax为汽车以第一速度经过减速带时路噪主动控制器的输出信号最大值。
15、在一种实施方式中,所述汽车主动降噪系统设有位于车内的扬声器,所述扬声器根据所述路噪主动控制器的输出信号输出声音信号以降低路噪。
16、在一种实施方式中,所述根据所述参考加速度信号xn的阈值,设定其对应的控制值包括:
17、当所述参考加速度信号xn大于阈值时,将其置为0;
18、表达为:
19、其中,xmax为汽车以第二速度经过比利时路面时参考加速度信号最大值。
20、在一种实施方式中,所述根据所述车内噪声信号en的阈值,设定其对应的控制值包括:
21、当所述车内噪声信号en大于阈值时,将其置为0;
22、表达为:
23、其中,emax为汽车以第三速度经过光滑沥青路面时车内噪声信号最大值。
24、在一种实施方式中,所述车内噪声信号en为路面振动激励和所述路噪主动控制器的输出信号叠加后所述误差麦克风处的响应。
25、在一种实施方式中,所述路噪数据采集时,所述路噪主动控制器采用fxlms算法。
26、本申请实施例提供的技术方案带来的有益效果包括:
27、本申请提供一种基于归一化最小均方的主动降噪方法,在进行路噪数据处理时,基于归一化最小均方算法,路噪主动控制器根据车内噪声信号和参考加速度信号设定步长因子,步长因子随参考加速度信号变化而变化,避免因经验值设定步长因子导致系统发散问题;同时,根据输出信号或参考加速度信号或车内噪声信号的阈值,设定其对应的控制值,根据预先采集的路噪数据增加相关控制实现系统的控制,有效地提升路噪主动控制系统的稳健性,在不同工况和环境下都能够更好地对路噪进行主动降噪,不出现系统发散的现象,提高控制精度,可靠地进行车内路噪主动控制。
技术特征:
1.一种基于归一化最小均方的主动降噪方法,其特征在于,其包括以下步骤:
2.如权利要求1所述的基于归一化最小均方的主动降噪方法,其特征在于,所述步长因子μ随所述参考加速度信号xn变化而变化,表达为:
3.如权利要求2所述的基于归一化最小均方的主动降噪方法,其特征在于,所述参考步长因子的范围为(0.001,0.1)。
4.如权利要求3所述的基于归一化最小均方的主动降噪方法,其特征在于,所述步长因子的范围为(-1,1)。
5.如权利要求1所述的基于归一化最小均方的主动降噪方法,其特征在于,所述根据所述输出信号un的阈值,设定其对应的控制值包括:
6.如权利要求5所述的基于归一化最小均方的主动降噪方法,其特征在于,所述汽车主动降噪系统设有位于车内的扬声器,所述扬声器根据所述路噪主动控制器的输出信号输出声音信号以降低路噪。
7.如权利要求1所述的基于归一化最小均方的主动降噪方法,其特征在于,所述根据所述参考加速度信号xn的阈值,设定其对应的控制值包括:
8.如权利要求1所述的基于归一化最小均方的主动降噪方法,其特征在于,所述根据所述车内噪声信号en的阈值,设定其对应的控制值包括:
9.如权利要求8所述的基于归一化最小均方的主动降噪方法,其特征在于,所述车内噪声信号en为路面振动激励和所述路噪主动控制器的输出信号叠加后所述误差麦克风处的响应。
10.如权利要求1所述的基于归一化最小均方的主动降噪方法,其特征在于,所述路噪数据采集时,所述路噪主动控制器采用fxlms算法。
技术总结
本申请涉及一种基于归一化最小均方的主动降噪方法,包括:布置汽车主动降噪系统,汽车主动降噪系统包括误差麦克风、参考传感器、路噪主动控制器;路噪数据采集,误差麦克风采集车内噪声信号传输至路噪主动控制器;参考传感器采集不同位置的参考加速度信号传输至路噪主动控制器;路噪数据处理,基于归一化最小均方算法,路噪主动控制器根据车内噪声信号和参考加速度信号设定步长因子,步长因子随参考加速度信号变化而变化;根据输出信号或参考加速度信号或车内噪声信号的阈值,设定其对应的控制值。本申请提供的基于归一化最小均方的主动降噪方法,根据采集的路噪数据增加相关控制实现系统的控制,在不同工况和环境下都能对路噪进行主动降噪。
技术研发人员:黎术,程果,严辉,康润程,李剑波
受保护的技术使用者:襄阳达安汽车检测中心有限公司
技术研发日:
技术公布日:2024/9/2
技术研发人员:黎术,程果,严辉,康润程,李剑波
技术所有人:襄阳达安汽车检测中心有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除