一种采摘机器人末端执行器
本技术涉及采摘机器人领域,具体的是一种采摘机器人末端执行器。
背景技术:
1、农业果蔬采摘机器人逐渐成为机器人领域研究开发的热点,其相关技术在国内外已取得不少成果,但大部分停留在实验室研发阶段,由于农业果蔬采摘机器人的研发过程中,对末端执行器的研制要求较高
2、直至目前,采摘机器人末端执行器对比苹果的采摘采摘方式主要有两种:动作掰拧式和刀割切断式。动作掰拧式设计相应机构先对果实进行夹持抓牢,再利用腕关节的两个垂直方向上的转动来模拟人掰拧果柄的动作,其作业的对象要求果柄易于与果枝分离,同时需要严格控制好夹持果实的力的大小,否则极易损伤果实。刀割切断式主要是利用电机驱动圆锯刀或剪刀动作直接将果梗割断,这种方法传动机构方案和控制传感系统往往比较冗繁。
技术实现思路
1、针对现有技术的不足,本实用新型提出了一种采摘机器人末端执行器。
2、本实用新型的目的可以通过以下技术方案实现:
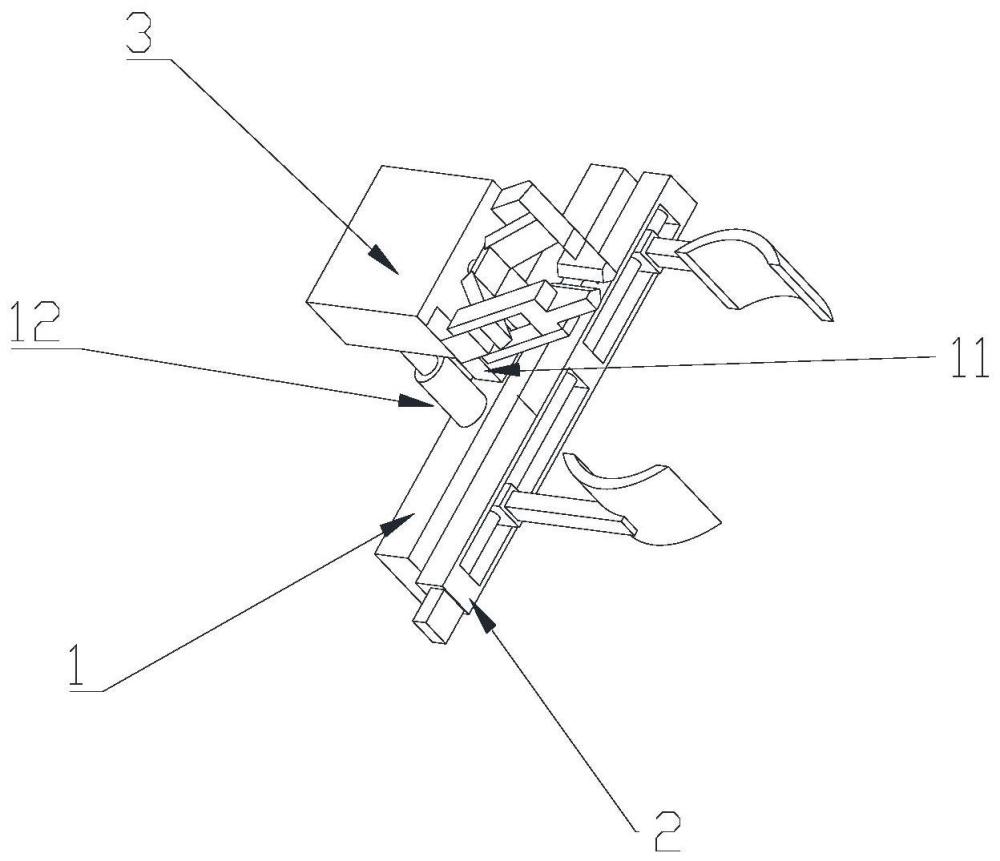
3、一种采摘机器人末端执行器,包括底座:底座侧壁固定连接有连接架,底座顶端固定连接有气缸,气缸输出端固定连接有固定架;
4、连接架:其上开设有移动槽,移动槽内侧壁转动连接有螺纹杆,螺纹杆两端皆螺纹连接有移动块,移动块上固定连接有支撑杆,支撑杆顶端固定连接有夹块;以及
5、固定架:其顶端固定连接有固定杆,固定杆顶端转动连接有连杆,连杆靠近顶端的位置固定连接有刀片,连接块两端皆转动连接有第二连杆。
6、本实用新型的有益效果:通过视觉传感器定位苹果的位置,将末端执行器移动至苹果处,启动电机带动螺纹杆转动,从而带动两个移动块相对移动,带动两个夹块将苹果固定,通过压力传感器控制夹块与苹果之间的压力,避免损坏水果,当夹块将苹果固定后,根据苹果的大小,启动气缸,移动刀片位置,以精确剪断苹果根茎,启动电动推杆,带动第二连杆转动,从而带动连杆转动,进而带动两个刀片相对移动,对果柄剪断,简化了控制结构,降低了成本和控制难度结构,因此具有小巧紧凑、重量轻、效率高及控制简单的优点。
技术特征:
1.一种采摘机器人末端执行器,其特征在于,包括:
2.根据权利要求1所述的一种采摘机器人末端执行器,其特征在于,所述螺纹杆(22)两端螺纹旋向相反。
3.根据权利要求1所述的一种采摘机器人末端执行器,其特征在于,所述移动块(23)与移动槽(21)内壁滑动连接。
4.根据权利要求1所述的一种采摘机器人末端执行器,其特征在于,所述夹块(25)内壁设有压力传感器(26)。
5.根据权利要求1所述的一种采摘机器人末端执行器,其特征在于,所述连接架(2)侧壁固定连接有电机(27),电机(27)输出端与螺纹杆(22)固定连接。
6.根据权利要求1所述的一种采摘机器人末端执行器,其特征在于,所述固定架(3)内固定连接有电动推杆(31),电动推杆(31)输出端固定连接有连接块(32),连接块(32)两端皆转动连接有第二连杆(36),第二连杆(36)另一端与连杆(34)侧壁转动连接。
7.根据权利要求6所述的一种采摘机器人末端执行器,其特征在于,所述底座(1)顶端位于气缸(11)两侧固定连接有伸缩杆(12),伸缩杆(12)顶端与固定架(3)固定连接。
技术总结
本技术涉及采摘机器人领域,具体的是一种采摘机器人末端执行器,包括底座:底座侧壁固定连接有连接架,底座顶端固定连接有气缸,气缸输出端固定连接有固定架;连接架:其上开设有移动槽,移动槽内侧壁转动连接有螺纹杆,螺纹杆两端皆螺纹连接有移动块,移动块上固定连接有支撑杆,支撑杆顶端固定连接有夹块;以及固定架:其顶端固定连接有固定杆,固定杆顶端转动连接有连杆,连杆靠近顶端的位置固定连接有刀片,通过视觉传感器定位苹果的位置,将末端执行器移动至苹果处,启动电机带动螺纹杆转动,从而带动两个移动块相对移动,带动两个夹块将苹果固定,通过压力传感器控制夹块与苹果之间的压力,避免损坏水果,当夹块将苹果固定后。
技术研发人员:金何
受保护的技术使用者:六安职业技术学院
技术研发日:20231211
技术公布日:2024/9/2
技术研发人员:金何
技术所有人:六安职业技术学院
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除