止轮器定位装置的制作方法
本技术涉及一种止轮器定位装置。
背景技术:
1、铁路止轮器俗称铁鞋,是铁路作业防溜设备。但是现在的铁路止轮器在使用过程中通常存在易丢失,安全性差的问题,且无法实现对止轮器的姿态位置进行监测的问题。
技术实现思路
1、本实用新型是为了解决现有止轮器存在易丢失安全性差,且无法对铁路止轮器的位置姿态进行实时监测问题,提出了一种止轮器定位装置。
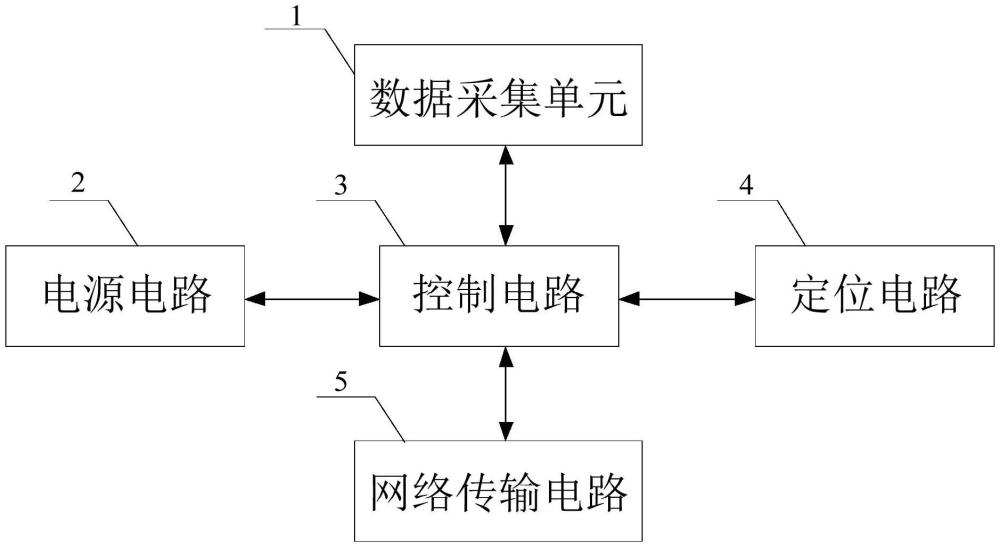
2、本实用新型所述的止轮器定位装置,所述定位装置包括数据采集单元、电源电路、控制电路、定位电路和网络传输电路;
3、数据采集单元包括姿态传感器和超声波测距传感器;
4、所述姿态传感器用于采集止轮器定位装置的姿态,并将采集的姿态信号传输至控制电路;
5、超声波测距传感器用于采集铁轨上列车的距离,并将采集的距离信号传输至控制电路;
6、定位电路用于对止轮器进行定位;并将定位信号传输至控制电路;
7、控制电路将止轮器的定位、姿态和列车的距离信息传递至网络传输电路并接收网络传输电路的控制指令;
8、所述网络传输电路将止轮器的定位、姿态和列车的距离信息发送出去;
9、电源电路包括锂电池、电量计量显示电路和充电电路;
10、所述锂电池用于为数据采集单元、控制电路、定位电路和网络传输电路(5)供电,
11、电量计量显示电路通过指示灯对锂电池的剩余电量进行显示;
12、充电电路包括电池充电接口,所述充电接口连接锂电池的充电端。
13、进一步地,本实用新型中,网络传输电路采用4g通讯芯片air724ug实现。
14、进一步地,本实用新型中,还包括显示电路,所述显示电路的信号输入端连接控制电路(3)的显示信号输出端。
15、进一步地,本实用新型中,控制电路通过串口与网络传输电路连接,控制电路通过i2c与姿态传感器和电源电路连接,控制电路通过串口与定位电路连接,定位电路通过io与显示电路连接。
16、进一步地,本实用新型中,还包括壳体,所述数据采集单元、电源电路、控制电路、定位电路和网络传输电路设置在壳体内,所述壳体贴设在止轮器的侧面。
17、进一步地,本实用新型中,控制电路包括型号为sim32151c8txa的控制芯片、电阻r1、r2、r3、r4、r5、r6、r7、电容c1和c2;
18、控制芯片sim32151c8txa的10号引脚连接电阻r1的一端,电阻r1的另一端、18号引脚和19号引脚同时连接数据采集单元的信号输出端;
19、控制芯片sim32151c8txa的30号引脚连接电阻r2的一端,控制芯片sim32151c8txa的31号引脚连接电阻r3的一端,电阻r2的另一端、电阻r3的另一端和控制芯片sim32151c8txa的17号引脚同时连接定位电路的定位信号输入端;
20、电阻r2的另一端和电阻r3的另一端还连接网络传输电路的信号输入输出端;
21、控制芯片sim32151c8txa的42号引脚连接电阻r4的一端,控制芯片sim32151c8txa的43号引脚连接电阻r5的一端,所述电阻r4的另一端和电阻r5的另一端连接电源电路(2);
22、控制芯片sim32151c8txa的1号引脚、24号引脚、48号引脚和36号引脚连接电源电路(2);
23、控制芯片sim32151c8txa的9号引脚连接电阻r6的一端,电阻r6的另一端同时连接控制芯片sim32151c8txa的36号引脚和电源电路;
24、电容c2连接在控制芯片sim32151c8txa的8号引脚和9号引脚之间,所述控制芯片sim32151c8txa的8号引脚接地;
25、控制芯片sim32151c8txa的23号引脚、35号引脚和47号引脚接地;
26、控制芯片sim32151c8txa的7号引脚连接电容c1的一端,电容c1的另一端接地;
27、控制芯片sim32151c8txa的44号引脚连接电阻r7的一端,电阻r7的另一端接地。
28、进一步地,本实用新型中,定位电路(4)采用型号为um960的芯片实现。
29、本实用新型中采用定位电路对止轮器的位置进行定位,采用姿态传感器对止轮器的姿态进行采集,有效保证远程监测平台可以实时获取止轮器的位置和姿态,且采用超声波测距传感器检测来车的距离和止轮器姿态信号发送至远程端,保证了止轮器安全的同时,实现了对姿态的采集,避免止轮器姿态变化影响使用。
技术特征:
1.止轮器定位装置,其特征在于,所述定位装置包括数据采集单元(1)、控制电路(3)、定位电路(4)和网络传输电路(5);
2.根据权利要求1所述的止轮器定位装置,其特征在于,还包括电源电路(2),电源电路(2)包括锂电池、电量计量显示电路和充电电路;
3.根据权利要求1所述的止轮器定位装置,其特征在于,网络传输电路(5)采用4g通讯芯片air724ug实现。
4.根据权利要求1或2所述的止轮器定位装置,其特征在于,还包括壳体,所述数据采集单元(1)、电源电路(2)、控制电路(3)、定位电路(4)和网络传输电路(5)设置在壳体内,所述壳体贴设在止轮器的侧面。
5.根据权利要求1所述的止轮器定位装置,其特征在于,控制电路(3)包括型号为sim32151c8txa的控制芯片、电阻r1、r2、r3、r4、r5、r6、r7、电容c1和c2;
6.根据权利要求1所述的止轮器定位装置,其特征在于,定位电路(4)采用型号为um960的芯片实现。
技术总结
止轮器定位装置,涉及一种止轮器定位装置。是为了解决现有止轮器存在易丢失安全性差,且无法对铁路止轮器的位置姿态进行实时监测问题。本技术所述的数据采集单元包括姿态传感器和超声波测距传感器;所述姿态传感器用于采集止轮器定位装置的姿态,并将采集的姿态信号传输至控制电路;超声波测距传感器用于采集铁轨上列车的距离,并将采集的距离信号传输至控制电路;定位电路用于对止轮器进行定位;将定位信号传输至控制电路;控制电路将接收的信息传递至网络传输电路;所述网络传输电路将止轮器的定位、姿态和列车的距离信息发送出去。适用于铁路止轮器定位。
技术研发人员:张瑜峰,车洪雨,邱德仁,刘钦明,周宏敏,李强,刘传奇,孔祥禄,刘洋,刘为民,李金勇,张丽娟,黄文姣,张博,郗子捷
受保护的技术使用者:哈尔滨国铁科技集团股份有限公司
技术研发日:20231117
技术公布日:2024/9/2
技术研发人员:张瑜峰,车洪雨,邱德仁,刘钦明,周宏敏,李强,刘传奇,孔祥禄,刘洋,刘为民,李金勇,张丽娟,黄文姣,张博,郗子捷
技术所有人:哈尔滨国铁科技集团股份有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除