万向轮模块及割草机器人的制作方法
本申请涉及割草设备,更具体地说,是涉及一种万向轮模块及割草机器人。
背景技术:
1、智能割草机器人一般包括两个驱动轮及位于驱动轮前侧的万向轮,驱动轮和万向轮共同对智能割草机器人进行支撑,万向轮可以提高智能割草机器人的运动灵活性。现有智能割草机器人的万向轮包括轮轴和转动安装在轮轴的一端上的轮体,轮轴的另一端转动安装在一与智能割草机器人的底盘直接连接的轴座上,从而实现将万向轮安装到底盘上。在这种方式中,万向轮位于底盘(即机器人本体)的下方,万向轮之间的距离受限于底盘的宽度,智能割草机器人在工作时会在草坪上行走,在草坪上有斜坡时,万向轮之间的距离过小会使得智能割草机器人的稳定性不够,容易侧倾。
2、因此,现有技术还有待改进和发展。
技术实现思路
1、本申请的目的在于提出一种万向轮模块及割草机器人,以提高割草机器人在行进过程中的稳定性。
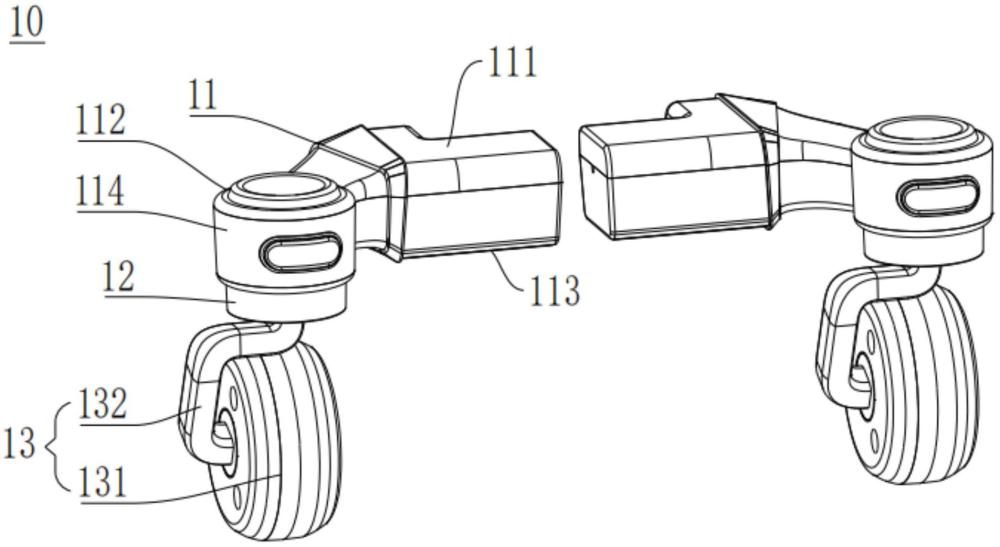
2、为实现上述目的,本申请第一方面提供一种万向轮模块,用于与割草机器人的机器人本体连接,其特征在于,包括:
3、安装臂,所述安装臂在长度方向上的两端分别为第一端和第二端,所述安装臂的第一端具有第一安装部,所述安装臂的第二端具有第二安装部,所述第一安装部用于连接所述机器人本体;
4、轴座,所述轴座与所述第二安装部连接;
5、万向轮组件,包括轮体和轮轴,所述轮体转动连接在所述轮轴的一端,所述轮轴的另一端活动连接在所述轴座上,所述轮轴的延伸方向与所述安装臂的延伸方向相交。
6、可选地,所述第一安装部用于可拆卸连接在所述机器人本体上,所述轴座与所述第二安装部可拆卸连接。
7、可选地,所述第一安装部和所述第二安装部上均设置有螺纹孔。
8、可选地,所述安装臂包括第一子壳和第二子壳,所述第一安装部设置在所述第二子壳的第一端,所述第二安装部设置在所述第二子壳的第二端,所述第一子壳扣接在所述第二子壳背离所述轴座的一侧,所述第一子壳和所述第二子壳在扣接后形成有第一腔体。
9、可选地,所述第一子壳通过卡扣和螺栓中的至少一种连接在所述第二子壳上。
10、可选地,所述第一子壳和所述第二子壳上均设置有加强筋,所述加强筋位于所述第一腔体内。
11、可选地,所述轴座上设置有轴孔,所述轮轴的另一端可转动并可升降滑动安装在所述轴孔中,所述轮轴的另一端上还设置有磁铁,所述磁铁位于所述第一腔体外,所述第二子壳上安装有磁感应传感器,所述磁感应传感器对应所述磁铁并位于所述第一腔体内,所述磁铁用于跟随所述轮轴升降运动并靠近或者远离所述磁感应传感器。
12、可选地,所述第二安装部上设置有容纳槽,所述磁铁安装在所述轮轴的顶部并用于在所述容置纳内升降运动。
13、可选地,所述安装臂的第一端和第二端之间设有拐角段。
14、本申请第二方面提供一种割草机器人,包括机器人本体及上述的万向轮模块,所述第一安装部与所述机器人本体连接。
15、可选地,所述机器人本体包括底盘和盖体,所述底盘和所述盖体围合形成第二腔体,所述盖体上开设有避让孔,所述安装臂的第一端通过所述避让孔伸入所述第二腔体内,所述第一安装部与所述底盘连接。
16、可选地,所述底盘上设置有过孔,所述第一安装部与所述底盘通过穿过所述过孔的紧固件可拆卸连接。
17、可选地,所述机器人本体包括底盘,所述万向轮模块的所述第一安装部连接在所述底盘上,所述底盘上还设有压板,所述压板用于将所述安装臂的第一端压靠在所述底盘上。
18、可选地,所述机器人本体包括第一机身和第二机身,所述第一机身与所述第二机身上下分布,所述万向轮模块的数量为两个,两个所述万向轮模块对称设置在所述第二机身上,所述第二机身上还设置有两个独立的驱动轮模块以实现差速转向。
19、本申请提供的万向轮模块及割草机器人的有益效果至少在于:本申请方案在现有万向轮结构的基础上增加安装臂,安装臂本身具有一定的长度,利用安装臂来使得万向轮模块部分延伸到机器人本体的侧方,万向轮组件之间的距离不再受限于机器人本体的宽度,增大万向轮组件之间的距离,提升割草机器人在行走时的稳定性,使得其在爬坡或下坡时不容易侧翻。
技术特征:
1.一种万向轮模块,用于与割草机器人的机器人本体连接,其特征在于,包括:
2.根据权利要求1所述的万向轮模块,其特征在于,所述第一安装部用于可拆卸连接在所述机器人本体上,所述轴座与所述第二安装部可拆卸连接。
3.根据权利要求2所述的万向轮模块,其特征在于,所述第一安装部和所述第二安装部上均设置有螺纹孔。
4.根据权利要求1至3任一项所述的万向轮模块,其特征在于,所述安装臂包括第一子壳和第二子壳,所述第一安装部设置在所述第二子壳的第一端,所述第二安装部设置在所述第二子壳的第二端,所述第一子壳扣接在所述第二子壳背离所述轴座的一侧,所述第一子壳和所述第二子壳在扣接后形成有第一腔体。
5.根据权利要求4所述的万向轮模块,其特征在于,所述第一子壳通过卡扣和螺栓中的至少一种连接在所述第二子壳上。
6.根据权利要求4所述的万向轮模块,其特征在于,所述第一子壳和所述第二子壳上均设置有加强筋,所述加强筋位于所述第一腔体内。
7.根据权利要求4所述的万向轮模块,其特征在于,所述轴座上设置有轴孔,所述轮轴的另一端可转动并可升降滑动安装在所述轴孔中,所述轮轴的另一端上还设置有磁铁,所述磁铁位于所述第一腔体外,所述第二子壳上安装有磁感应传感器,所述磁感应传感器对应所述磁铁并位于所述第一腔体内,所述磁铁用于跟随所述轮轴升降运动并靠近或者远离所述磁感应传感器。
8.根据权利要求7所述的万向轮模块,其特征在于,所述第二安装部上设置有容纳槽,所述磁铁安装在所述轮轴的顶部并用于在所述容纳槽内升降运动。
9.根据权利要求1至3任一项所述的万向轮模块,其特征在于,所述安装臂的第一端和第二端之间设有拐角段。
10.一种割草机器人,其特征在于,包括机器人本体及如权利要求1-9中任一项所述的万向轮模块,所述第一安装部与所述机器人本体连接。
11.根据权利要求10所述的割草机器人,其特征在于,所述机器人本体包括底盘和盖体,所述底盘和所述盖体围合形成第二腔体,所述盖体上开设有避让孔,所述安装臂的第一端通过所述避让孔伸入所述第二腔体内,所述第一安装部与所述底盘连接。
12.根据权利要求11所述的割草机器人,其特征在于,所述底盘上设置有过孔,所述第一安装部与所述底盘通过穿过所述过孔的紧固件可拆卸连接。
13.根据权利要求10所述的割草机器人,其特征在于,所述机器人本体包括底盘,所述万向轮模块的所述第一安装部连接在所述底盘上,所述底盘上还设有压板,所述压板用于将所述安装臂的第一端压靠在所述底盘上。
14.根据权利要求10至13任一项所述的割草机器人,其特征在于,所述机器人本体包括第一机身和第二机身,所述第一机身与所述第二机身上下分布,所述万向轮模块的数量为两个,两个所述万向轮模块对称设置在所述第二机身上,所述第二机身上还设置有两个独立的驱动轮模块以实现差速转向。
技术总结
本申请涉及割草设备技术领域,提供一种万向轮模块及割草机器人,万向轮模块包括:安装臂,安装臂在长度方向上的两端分别为第一端和第二端,安装臂的第一端具有第一安装部,安装臂的第二端具有第二安装部,第一安装部用于连接机器人本体;轴座,轴座与第二安装部连接;万向轮组件,包括轮体和轮轴,轮体转动连接在轮轴的一端,轮轴的另一端活动连接在轴座上,轮轴的延伸方向与安装臂的延伸方向相交。本申请方案在现有万向轮结构的基础上增加安装臂,安装臂的一端用于与机器人本体连接,安装臂的另一端安装万向轮组件,利用安装臂来使得万向轮模块部分延伸到机器人本体的侧方,增大万向轮组件之间的距离,提升割草机器人的稳定性。
技术研发人员:汪洋
受保护的技术使用者:元鼎智能创新(国际)有限公司
技术研发日:20240104
技术公布日:2024/9/2
技术研发人员:汪洋
技术所有人:元鼎智能创新(国际)有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除