一种用于串型水果采摘的末端执行器的制作方法
本技术涉及水果采摘,具体涉及一种用于串型水果采摘的末端执行器。
背景技术:
1、目前,在针对葡萄、荔枝、龙眼等串型水果采摘时,大多依靠人工或半自动机械完成水果采摘;人工或半自动采摘串型水果劳动强度大、工作效率低且易造成采摘机械对串型水果果实、果树等的损伤,影响水果的收获、增加种植成本。同时,目前现有技术中还存在自动采摘水果的采摘机器人,中国专利文献cn220191505u公开了一种采摘机器人手臂,其通过安装座、采摘构件和收集构件之间的配合设置,通过机器人控制采摘收集进行升降和位移,随后控制裁剪框进行运动,并运动到水果的上方通过裁剪刀和裁剪框的配合可以将水果剪下,水果在重力的作用下将落到缓冲板上,同时经过弹簧的缓冲可以起到缓冲的作用,有效防止水果损坏,水果经过导向板将会落到收集箱内部,通过海绵垫可以起到二次缓冲的目的,可以防止水果与收集箱发生刚性碰撞,同时可以通过机器人控制收集箱发生晃动,可以使水果陷入放置槽内部,当水果的数量合适之后,可以开启电动伸缩杆使其带动分层板运动,直至分层板完全进入收集箱内部后,可以继续进行水果的收集,同时可以防止因水果堆积而导致水果之间发生碰撞,可以极大的提高水果采摘的质量。然而,串型水果通常成串生长在果树枝条上,若利用裁剪框进行收集,串型水果极易由于掉落到缓冲板的冲击力与重力作用而出现散开、破碎等问题,从而影响串型水果的储存、运输、包装及售卖等。
技术实现思路
1、针对以上现有技术存在的问题,本实用新型的目的在于提供一种用于串型水果采摘的末端执行器,该末端执行器一是能够有效实现串型水果的剪切、二是能够避免剪切后的串型水果掉落,从而确保串型水果成串的放置在收集框中,便于串型水果的储存、运输、包装等。
2、本实用新型的目的通过以下技术方案实现:
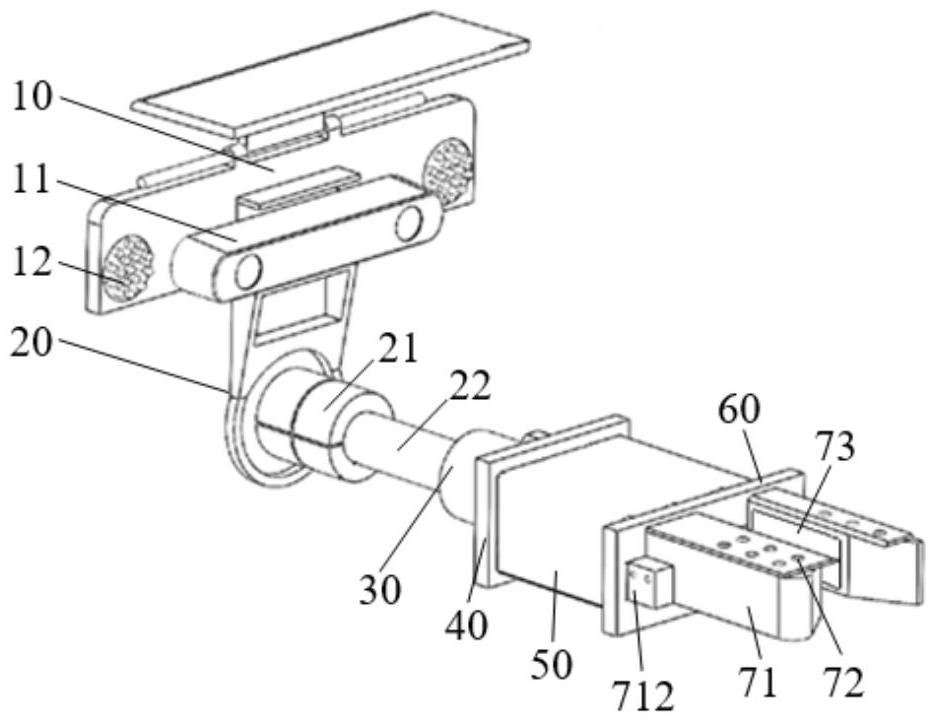
3、一种用于串型水果采摘的末端执行器,包括安装支架、连接支架、驱动腔、定位板、滑动套筒、滑动板及采摘组件,连接支架固定设置在安装支架下侧、用于连接安装支架与驱动腔,安装支架设置在采摘机器人机械臂上;驱动腔设置在连接支架远离安装支架的一端且驱动腔外壁设置定位板,定位板远离驱动腔的一侧设置滑动套筒且滑动套筒远离定位板的一端设置滑动板;滑动板端面对称设置两组采摘组件,采摘组件包括采摘爪、切割刀片及夹持块,采摘爪滑动设置在滑动板的端面且采摘爪的顶端端面固定设置切割刀片,两组切割刀片刀刃朝向相互靠近的一侧,采摘爪相互靠近的一侧侧面分别开设滑槽且滑槽内滑动设置夹持块,夹持块与滑槽通过弹簧连接。
4、基于上述方案的进一步优化,所述安装支架靠近驱动腔的一侧侧面中部设置双目立体相机,用于对待采摘的串型水果进行识别、定位,从而获取采摘点;安装支架位于双目立体相机的两侧分别设置led光源,通过调节光照亮度、避免双目立体相机的成像受到外界环境光干扰。
5、基于上述方案的进一步优化,所述连接支架与驱动腔之间还设置伸缩组件,伸缩组件包括气缸与伸缩杆,从而实现驱动腔以及采摘组件沿驱动腔轴线方向的平移。
6、基于上述方案的进一步优化,所述采摘爪通过设置在滑动套筒内的驱动组件控制其在滑动板上的滑动,具体为:驱动组件包括螺杆、锥形块及连杆,螺杆同轴设置在滑动套筒内侧且螺杆两端分别与定位板、滑动板转动连接;螺杆外壁套接锥形块且螺杆与锥形块螺纹连接、锥形块外壁与滑动套筒内壁滑动连接;锥形块侧壁斜面且对应两个采摘爪分别设置连杆且连杆与锥形块斜面滑动连接、与采摘爪固定连接,滑动板分别对应连杆开设水平滑孔、连杆与水平滑孔滑动连接。
7、基于上述方案的进一步优化,所述采摘爪相互远离的一侧侧面设置辅助滑块,辅助滑块与采摘爪固定连接、与滑动板端面滑动连接。
8、基于上述方案的进一步优化,所述夹持块相互靠近的一侧侧面设置弹性层(如橡胶垫或硅胶垫),避免夹持过程中对采摘点造成损伤。
9、以下为本实用新型具备的技术效果:
10、本申请通过螺杆驱动锥形块沿其(即螺杆)轴线方向运动、利用连杆实现采摘爪在滑动板端面平移,从而实现采摘组件相向滑动或反向滑动;当采摘组件相向滑动时,两个夹持块的端面首先与串型水果的母枝接触,进而对采摘点下方的串型水果母枝形成预夹持,随着采摘爪的继续相向滑动,弹簧压缩产生弹力、夹持块对串型水果的母枝完成夹持,同时切割刀片对采摘点处的母枝完成切割,进而实现串型水果的成串采摘,避免采摘过程中或采摘后串型水果直接掉落而产生的散开、破损等问题,便于采摘后串型水果的存放、包装、运输等工序,提升串型水果的产值。
技术特征:
1.一种用于串型水果采摘的末端执行器,其特征在于:包括安装支架、连接支架、驱动腔、定位板、滑动套筒、滑动板及采摘组件,连接支架固定设置在安装支架下侧,安装支架设置在采摘机器人机械臂上;驱动腔设置在连接支架远离安装支架的一端且驱动腔外壁设置定位板,定位板远离驱动腔的一侧设置滑动套筒且滑动套筒远离定位板的一端设置滑动板;滑动板端面对称设置两组采摘组件,采摘组件包括采摘爪、切割刀片及夹持块,采摘爪滑动设置在滑动板的端面且采摘爪的顶端端面固定设置切割刀片,两组切割刀片刀刃朝向相互靠近的一侧,采摘爪相互靠近的一侧侧面分别开设滑槽且滑槽内滑动设置夹持块,夹持块与滑槽通过弹簧连接。
2.根据权利要求1所述的一种用于串型水果采摘的末端执行器,其特征在于:所述安装支架靠近驱动腔的一侧侧面中部设置双目立体相机;安装支架位于双目立体相机的两侧分别设置led光源。
3.根据权利要求1或2所述的一种用于串型水果采摘的末端执行器,其特征在于:所述连接支架与驱动腔之间还设置伸缩组件,伸缩组件包括气缸与伸缩杆。
4.根据权利要求1或2所述的一种用于串型水果采摘的末端执行器,其特征在于:所述采摘爪通过设置在滑动套筒内的驱动组件控制其在滑动板上的滑动,具体为:驱动组件包括螺杆、锥形块及连杆,螺杆同轴设置在滑动套筒内侧且螺杆两端分别与定位板、滑动板转动连接;螺杆外壁套接锥形块且螺杆与锥形块螺纹连接、锥形块外壁与滑动套筒内壁滑动连接;锥形块侧壁斜面且对应两个采摘爪分别设置连杆且连杆与锥形块斜面滑动连接、与采摘爪固定连接,滑动板分别对应连杆开设水平滑孔、连杆与水平滑孔滑动连接。
5.根据权利要求1或2所述的一种用于串型水果采摘的末端执行器,其特征在于:所述采摘爪相互远离的一侧侧面设置辅助滑块,辅助滑块与采摘爪固定连接、与滑动板端面滑动连接。
6.根据权利要求1或2所述的一种用于串型水果采摘的末端执行器,其特征在于:所述夹持块相互靠近的一侧侧面设置弹性层。
技术总结
本技术提供一种用于串型水果采摘的末端执行器,涉及水果采摘领域,包括依次设置的安装支架(10)、连接支架(20)、驱动腔(30)、定位板(40)、滑动套筒(50)、滑动板(60)及采摘组件,安装支架(10)设置在采摘机器人机械臂上;采摘组件包括采摘爪(71)、切割刀片(72)及夹持块(73),采摘爪(71)滑动设置在滑动板(60)的端面且采摘爪(71)的顶端端面固定设置切割刀片(72),采摘爪(71)相互靠近的一侧侧面分别开设滑槽(711)且滑槽(711)内滑动设置夹持块(73)。该末端执行器能够有效实现串型水果剪切、避免剪切后的串型水果掉落,从而便于串型水果的储存、运输、包装。
技术研发人员:王成琳,李兰云,杨景,王浩名,李春江,韩启宇
受保护的技术使用者:广东若铂智能机器人有限公司
技术研发日:20231229
技术公布日:2024/9/2
技术研发人员:王成琳,李兰云,杨景,王浩名,李春江,韩启宇
技术所有人:广东若铂智能机器人有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除