用于无人机机器人的采摘结构及控制方法与流程
本发明涉及智能机器人,特别涉及用于无人机机器人的采摘结构及控制方法。
背景技术:
1、采用机器人进行工业和农业的应用,具有极大的应用前景,特别是在农业种植和采摘方面,已成为世界现代农业发展的趋势。果实机械化采收一直是农业机械化领域的难点问题,也是决定果农作业效率的关键。
2、现有的果实采摘机器人的研发主要集中于末端执行器的设计,近年来移动小车加工业机器人或协作机器人构建果实采摘机器人的装置逐渐增多。但现有的果实采摘机器人在使用的过程中存在一定的缺陷,比如通常采用机械手臂结构,故采摘的距离和范围均比较小,采摘的环境条件也较为受限,往往需要多次的重复裁剪这样大大降低了采摘效率,且在采摘的过程中会造成果实挤压破损,造成了很多不必要的损失。
技术实现思路
1、本发明的目的在于提供用于无人机机器人的采摘结构及控制方法,通过系留无人机构架实施全方位的采摘结构,通过具有伸缩的采摘结构,提高操作操作的稳定性、适应性和效能。
2、为了实现上述目的,本发明的技术方案如下:
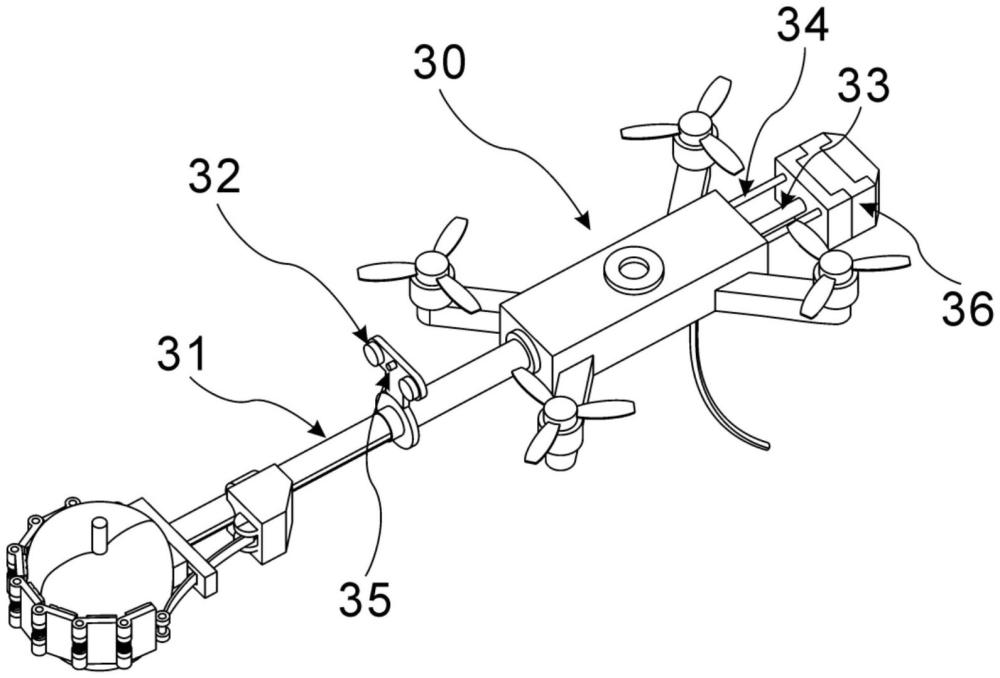
3、用于无人机机器人的采摘结构,在无人机前端布置有可伸缩式采摘结构,其包括两节式伸缩臂,伸缩臂内部可以布置伺服缸,用于调节和控制伸缩臂前端的长度;采摘结构包括与伸缩臂前端固定连接的基础块,基础块的一侧通过铰接轴结构连接有多块链板,链板之间同样通过铰接轴彼此连接;
4、在最后一块链板的后端连接有拉带,在基础块对应于铰接轴的另一侧布置有直孔,拉带穿过直孔布置,在拉带的后端,直孔的内侧处,布置有牵引机构。
5、进一步的,所述直孔的沿口为圆弧结构。
6、进一步的,链板的铰接轴上布置有回位扭簧。
7、进一步的,链板的内侧布置有柔性垫。
8、进一步的,柔性垫表面可以设有直槽或花纹结构。
9、进一步的,在基础块的外侧,具有内凹弧形垫。
10、用于无人机机器人的采摘结构的控制方法,应用于上述采摘结构,包括:
11、启动无人机进行对应高度的悬停操作,该高度与待采摘的果品的高度匹配;
12、在中央滑轨处,通过第二驱动部件使安装块及绕线机构的高度和无人机高度相对匹配,具体的说,该高度应当等于或低于无人机的高度,并尽可能使两者处于齐平状态;
13、绕线机构在上述两步骤时,控制线缆处于直线或轻微下垂弧线的状态;
14、无人机中,通过牵引机构对拉带进行向内拉伸操作,使所有的链板处于向内汇聚操作,并使所有的链板组成最小直径内收状态;
15、无人机中,通过伸缩臂使采摘部件处于最靠近无人机机身的状态;
16、无人机选择正对待采摘的果品,采用直线接近的方式靠近待采摘果品,并保持机身轻微向下倾斜的角度;
17、绕线机构在上述骤时,控制线缆处于直线或轻微下垂弧线的状态;
18、无人机接近待采摘的果品,通过过伸缩臂使采摘部件处于该果品下方的位置,同时,牵引机构对拉带进行向外释放操作,并使链板组成的内圈能够容纳该果品;
19、无人机调节机身角度,使链板处于该果品中部位置;
20、牵引机构对拉带进行向内拉伸操作,并使链板将该果品紧密抱紧操作;
21、无人机左右偏转机身,使该果品与树枝分离;
22、无人机中,通过伸缩臂使采摘部件及果品处于最靠近无人机机身的状态,同时对应改变调节块的距离,实现无人机尽可能的平衡;
23、无人机依据前进的路线进行回退操作,绕线机构控制线缆处于直线或轻微下垂弧线的状态;
24、无人机携带果品,回到初始出发位置。
25、进一步的,在无人机左右偏转机身,使该果品与树枝分离步骤中,在果品分离操作的同时,通过伺服缸改变调节块的距离,实现无人机尽可能的平衡。
26、采用本方案,对比现有技术,具有以下好处:
27、本方案用于无人机机器人的采摘结构,主体采用通过系留无人机结构实施果品的采摘操作,能够使采摘操作更加的灵活,首先可以适应多种高度和复杂情况下果品的采摘操作,第二采用系留无人机结构,能够解决无人机工作的电力支持问题,为无人机长时间高效率工作提供基础;
28、本方案的采摘结构,采用伸缩式采摘结构进行主体采摘操作,通过伸缩结构,可以减少无人机进入树枝的密集区域,从而减少了无人机被阻挡或妨碍的情况,大大提高其工作的稳定性,同时通过链板机拉带的组合结构,构建果品采集的环状结构,能够使果品从容的容置在其中,并且实现一圈受力操作,防止在采摘过程中对果品的伤害,大大提高了果品的采摘的效能和品质;
29、本方案用于无人机机器人的采摘结构的控制方法,通过控制线缆的布置情况,实现系留无人机自由的穿梭于树枝之间,防止发生线缆发生钩挂的情况,大大提高了无人机飞行采摘的稳定性,同时本控制方法提供采摘的合理结构,能够适应多种果品的采摘,并确保其不受损坏。
技术特征:
1.用于无人机机器人的采摘结构,其特征在于:在无人机前端布置有可伸缩式采摘结构,其包括两节式伸缩臂,伸缩臂内部可以布置伺服缸,用于调节和控制伸缩臂前端的长度;采摘结构包括与伸缩臂前端固定连接的基础块,基础块的一侧通过铰接轴结构连接有多块链板,链板之间同样通过铰接轴彼此连接;
2.根据权利要求1所述的用于无人机机器人的采摘结构,其特征在于:所述直孔的沿口为圆弧结构。
3.根据权利要求1所述的用于无人机机器人的采摘结构,其特征在于:链板的铰接轴上布置有回位扭簧。
4.根据权利要求1所述的用于无人机机器人的采摘结构,其特征在于:链板的内侧布置有柔性垫。
5.根据权利要求4所述的用于无人机机器人的采摘结构,其特征在于:柔性垫表面可以设有直槽或花纹结构。
6.根据权利要求1所述的用于无人机机器人的采摘结构,其特征在于:在基础块的外侧,具有内凹弧形垫。
7.用于无人机机器人的采摘结构的控制方法,应用于上述采摘结构,其特征在于:包括:
8.根据权利要求7所述的用于无人机机器人的采摘结构的控制方法,其特征在于:在无人机左右偏转机身,使该果品与树枝分离步骤中,在果品分离操作的同时,通过伺服缸改变调节块的距离,实现无人机尽可能的平衡。
技术总结
本发明公开了一种用于无人机机器人的采摘结构及控制方法,属于智能机器人技术领域,其通过系留无人机构架实施全方位的采摘结构,通过具有伸缩的采摘结构,提高操作操作的稳定性、适应性和效能。其中用于无人机机器人的采摘结构,在无人机前端布置有可伸缩式采摘结构,其包括两节式伸缩臂,伸缩臂内部可以布置伺服缸,用于调节和控制伸缩臂前端的长度;采摘结构包括与伸缩臂前端固定连接的基础块,基础块的一侧通过铰接轴结构连接有多块链板,链板之间同样通过铰接轴彼此连接。
技术研发人员:郝伦,杜浙明,张光新,郭鑫
受保护的技术使用者:严格机器人(杭州湾)国际创新研究院
技术研发日:
技术公布日:2024/9/2
技术研发人员:郝伦,杜浙明,张光新,郭鑫
技术所有人:严格机器人(杭州湾)国际创新研究院
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除